
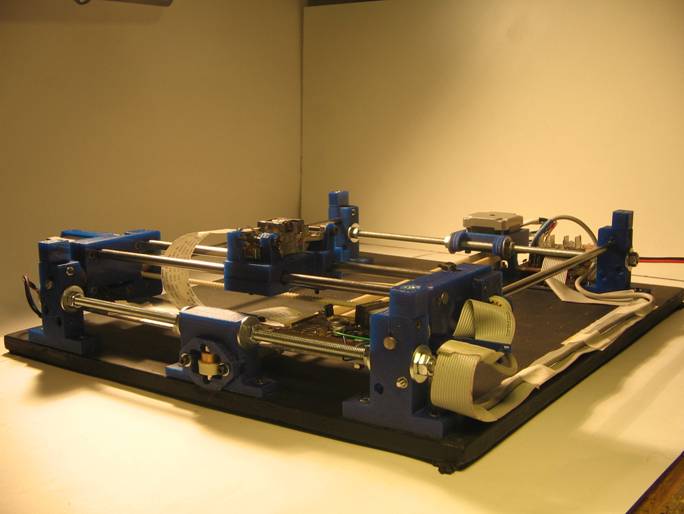
DiyouPCB – Cableado y alimentación
Para el cableado necesitaremos los siguientes materiales:
|
Cantidad |
Material |
|
|
1 |
PCB del Controller Shield |
|
|
1 |
Cable plano 16 vías x 600mm 1.27 pitch |
|
|
1 |
Cable plano 4 vías x 200mm 1.27 pitch |
|
|
1 |
Cable blindado 1 vía x 600mm |
|
|
2 |
Conectores hembra cable plano 16 vías |
|
|
1 |
Conector hembra 4 vías |
|
|
1 |
Conector macho 4 vías |
|
|
2 |
Conectores hembra 2 vías |
|
|
4 |
Tornillos M3 x 14mm |
|
|
4 |
Tuercas M3 |
|
|
4 |
Arandelas |
|
|
1 |
500mm x Cinta adhesiva |
|
|
1 |
130mm x Cinta adhesiva dobre cara |
|
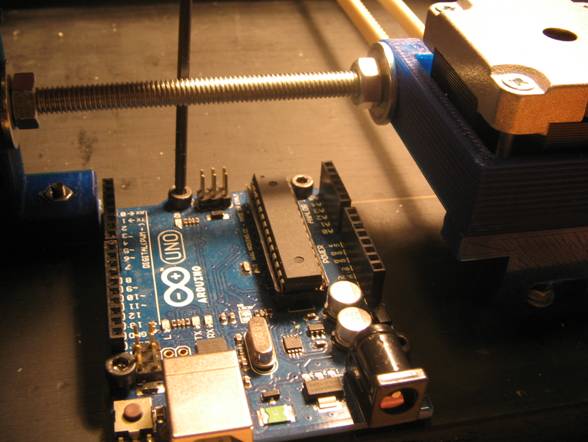
Primero atornillaremos el Arduino con cuatro tornillos M3 de 14mm. Utilizaremos dos arandelas y dos tuercas por el otro lado de la base.
No hay mucha distancia para poner separadores de PCB ya que el Shield está muy cerca de la varilla roscada, así que recomendamos usar algún tipo de lámina de plástico que aísle el Arduino de la base.
A continuación tenemos que introducir el cable blindado de la señal de Focus a través de la ventana rectangular del carro X, tal y como se muestra en la siguiente fotografía.
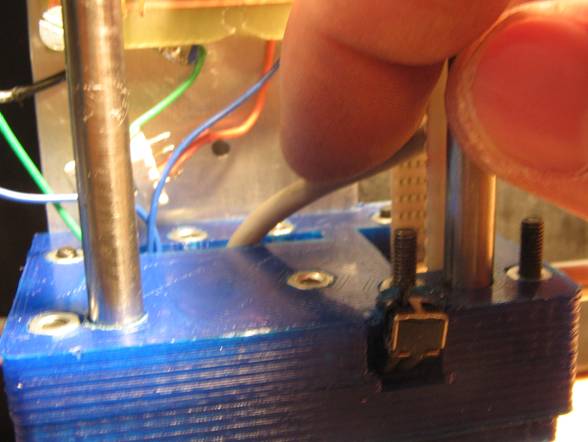
En ambos extremos del cable blindado tendremos que soldar un conector de 2 vías hembra.

Localizar el cable plano de 16 vías e instalar en él uno de los conectores, el del extremo que irá al Printer Controller Shield.
Atención: al colocar los drivers, ya que si los insertáis incorrectamente los destruís. También se destruyen al conectar/desconectar los motores o los drivers mientras la electrónica está alimentada.
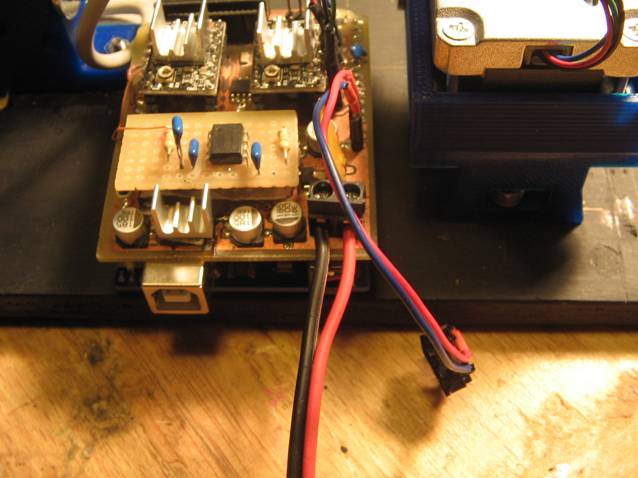
Insertar los dos Drivers Pololu en el Printer Controller Shield. Atención a la posición de los pines que podemos destruirlos.

A continuación insertar el PCS en el Arduino.

Conectar el cable del motor X, el conector del cable plano de 16 vías y el conector de 2 vías de la señal de Focus. Cuidado con la polaridad: comprobar que el cable rojo del cable plano de 16 vías va al pin número 1 del conector y que el cable rojo de la señal de Focus va al pin de señal (y el negro a GND), y el cable del motor X va conectado con el cable verde hacía el pin X-1B de la PCB.

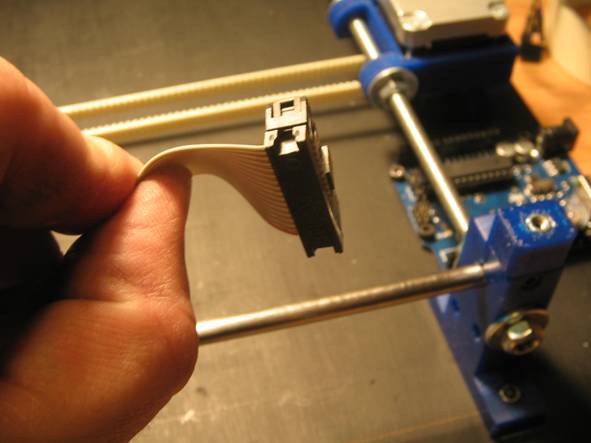
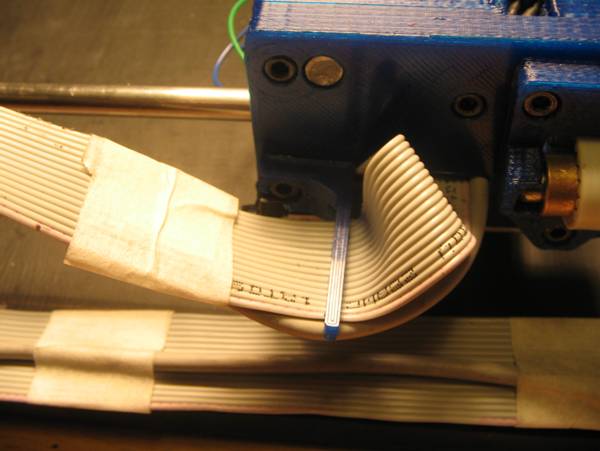
Introducir el cable plano de 16 vías por la ventana del carro X, por encima del cable de Focus, y con el hilo marcado en rojo a la derecha, tal y como se aprecia en la fotografía.
Por el otro lado del carro insertaremos otro conector de 16 vías en el cable plano.
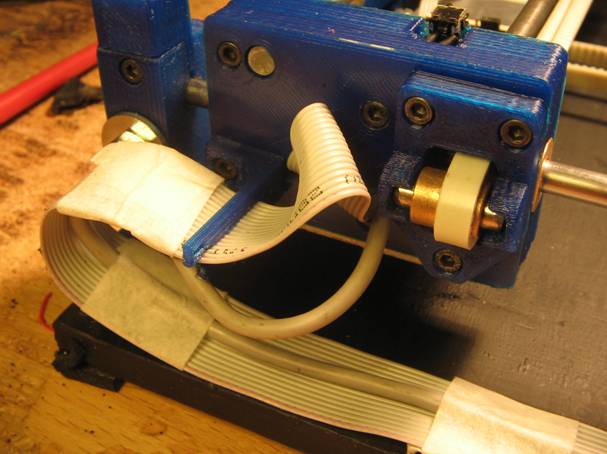
Ahora conectaremos todos los cables al Pickup Driver. Tenemos que conectar en sus respectivos conectores: el cable plano de 16 vías, el cable plano de 4 vías del motor Y, los cables de los microinterruptores de fin de carrera y el del cable blindado de la señal de Focus. Atención a las polaridades y a la posición del cable plano de 16 vías. El pin 1 esta a la derecha del conector (cable rojo en la fotografía).

El cable plano de 4 vías que va a lo largo de la pletina hasta el motor Y, tiene que ir por debajo de la PCB del Pickup Driver y conectar en ella.

En el otro extremo lo conectaremos al conector del motor Y. Lo sujetaremos a la pletina con un poco de cinta adhesiva. Atención a la conexión: el cable verde del motor debe ir al pin Y-1B de la PCB.

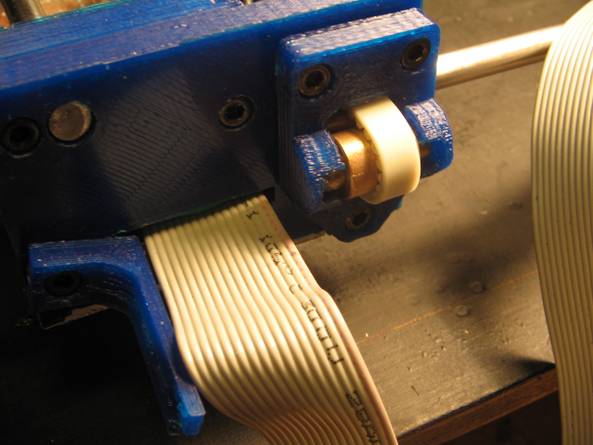
Sujetaremos también con cinta adhesiva el cable de la señal de Focus con el cable plano y los pasaremos por la ranura de la Abrazadera del Cable Plano.
Pegaremos en la base de la impresora unos 130 mm de cinta adhesiva de doble cara, tal y como se muestra en la fotografía.
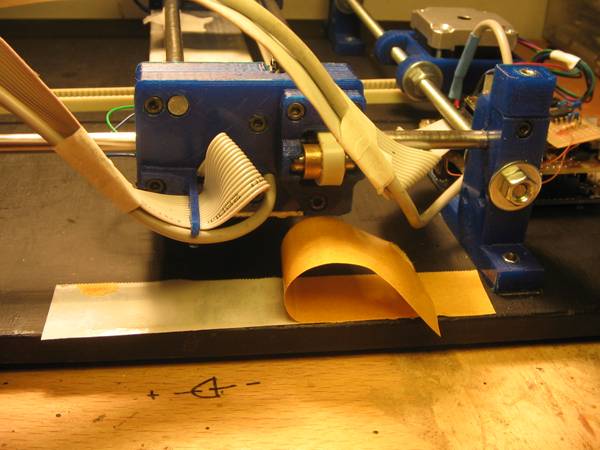
Pegaremos el cable plano a la cinta adhesiva y lo doblaremos para conducirlo hasta el Printer Controller Shield y el Arduino.

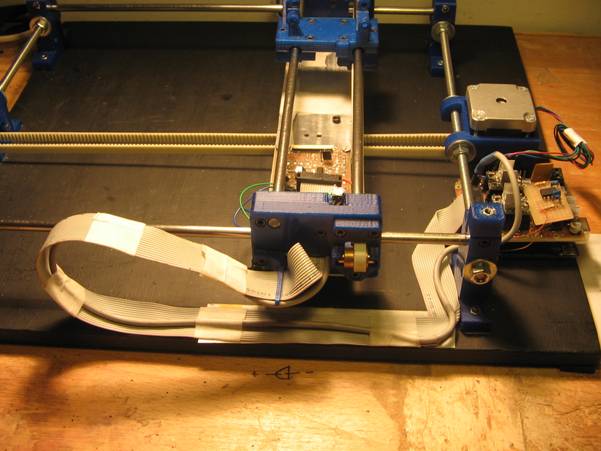
Ajustaremos entonces el cable plano en el lado que va sujeto al carro, para evitar que se enganche en el soporte del eje X.
Por ultimo moveremos el carro con la mano para comprobar que el cable se desliza junto a él y flexiona adecuadamente.
Instalación del Pickup
Para instalar el pickup necesitaremos:
|
Cantidad |
Material |
|
|
1 |
Pickup PHR-803T |
|
|
1 |
Cable plano FPC 45 vías 0.5 pitch |
|
|
1 |
Masilla adhesiva reusable |
|
|
1 |
Tornillos M3 x 35mm |
|
|
1 |
Tornillos M3 x 30mm |
|
|
2 |
Tuercas M3 |
|
Localizar el pickup y el cable plano.
Atención: Recomendamos especial cuidado al manipular el Pickup ya que es una pieza óptica muy delicada. No tocar la lente con los dedos ni manipularla. Cuidado igualmente al insertar el conector y en su manipulación en general. Es recomendable utilizar material y equipamiento anti-estático.
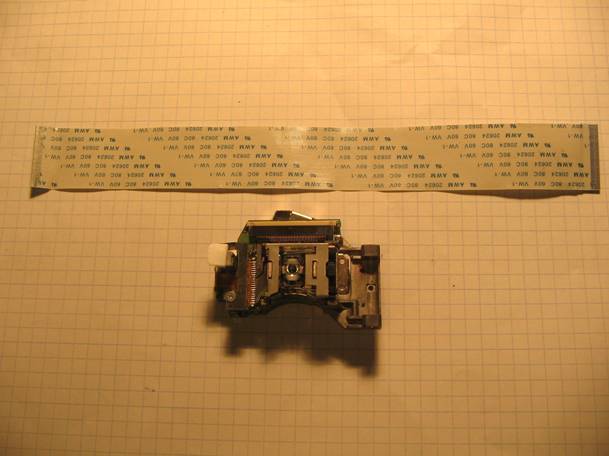
El Pickup viene de fábrica con una pieza de plástico de color negro que sirve para conectarlo al motor de pasos del lector de DVD original. No la vamos a usar en la impresora, así que tenemos que desinstalarla. Para ello utilizar un destornillador tipo estrella muy fino y quitar el pequeño tornillo que lo une al Pickup en la parte inferior.


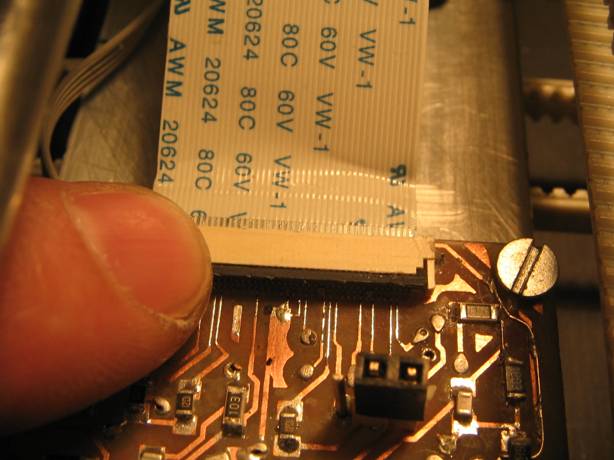
A continuación conectaremos el cable plano FPC al conector del Pickup Driver. Atención a la posición del cable. La cara que contiene el texto tiene que ir hacía arriba.
Ahora debemos repasar con una lima el Soporte del Pickup hasta que éste encaje en él perfectamente.
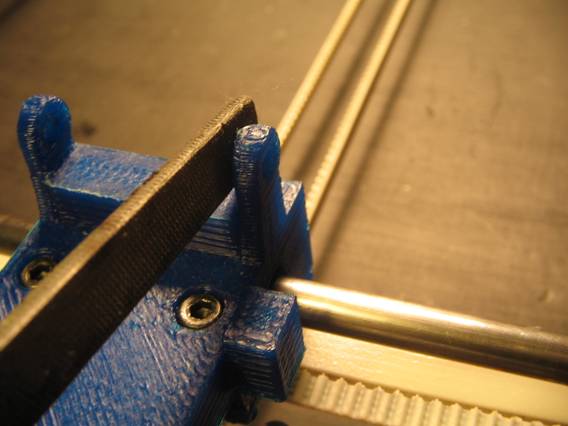
Probaremos a ver si el Pickup encaja en su alojamiento. Hay que introducirlo suavemente por el lado izquierdo y luego empujar el lado derecho hacía abajo hasta que encaje, tal y como se aprecia en las fotografías. Si no lo hace o lo hace con dificultad repasar el plástico con la lima.

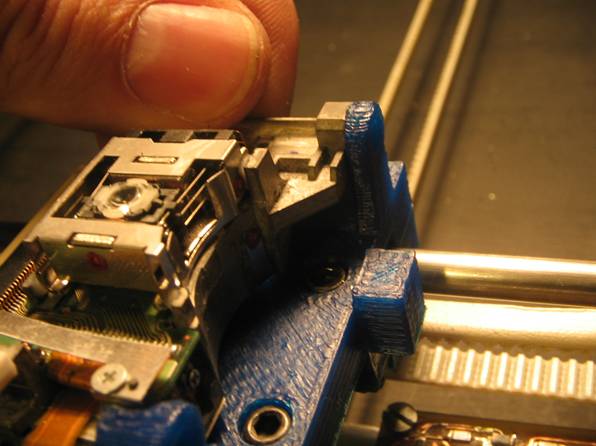
Antes de instalarlo definitivamente debemos aplicar algo de masilla adhesiva reusable donde apoya el Pickup en el soporte (la que se usa para pegar posters y documentos en paredes y pizarras). Esto hará más rígida la unión y evitará que el Pickup vibre.

Instalar entonces el Pickup presionándolo contra la masilla y a continuación eliminar el exceso de ésta.
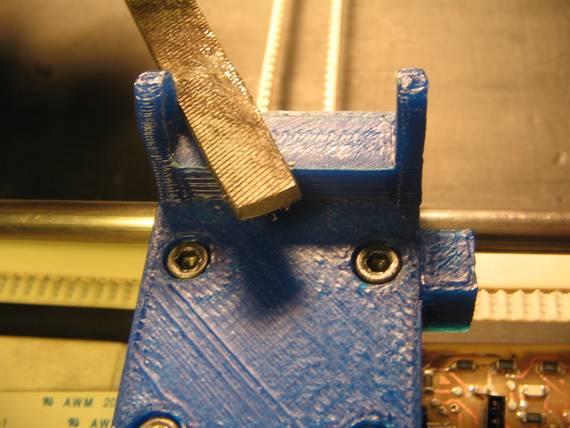
Entonces colocaremos los tornillos que sujetan el Pickup. Primero el de 35mm en el soporte más largo con su respectiva tuerca.

Luego el de 30mm en el soporte más corto. En este último es probable que tengamos que quitar el patín de teflón: una pieza de plástico de color blanco.
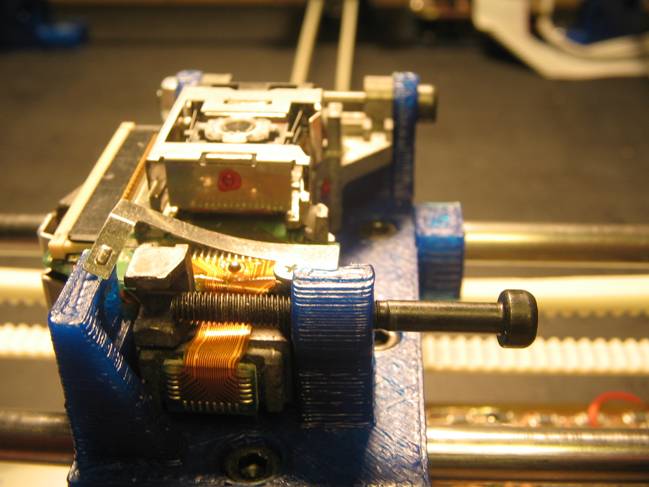
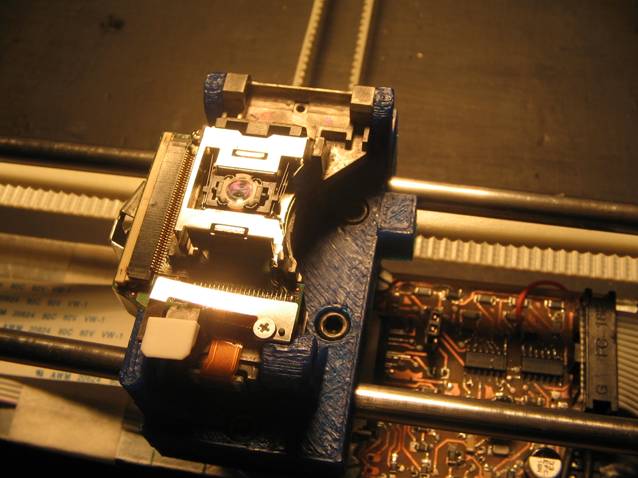
El Pickup una vez instalado quedará así:
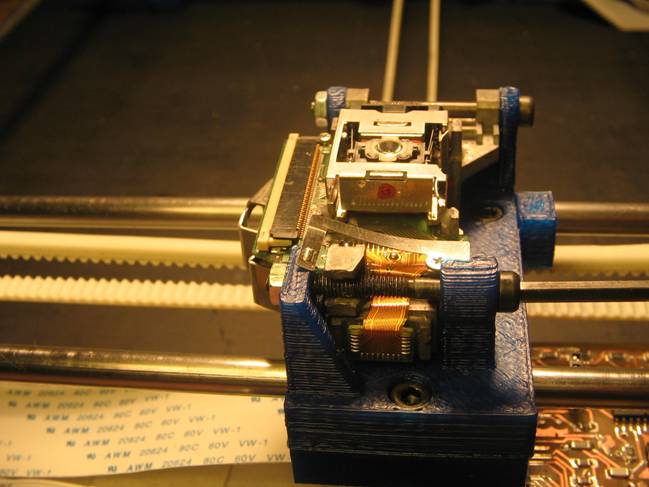
Ahora tenemos que conectar el cable plano al Pickup. La cara que va marcada con texto irá ahora hacía abajo. Abrir el conector subiendo la pestaña de color blanco. Insertar el cable hasta el fondo y cerrar la pestaña presionándola hacía abajo.


La impresora tendrá ahora este aspecto:
Alimentación
Necesitaremos los siguientes materiales:
|
Cantidad |
Material |
|
|
1 |
Alimentador 12V 2A |
|
|
1 |
Conector Fuente Alimentación y cables |
|
|
1 |
Conector hembra 2 vías |
|
|
1 |
Microinterruptor de reset y cables |
|
Atención: La alimentación de toda la impresora, incluida la del Arduino, se realiza a través de una única línea de 12V-2A conectada al Printer Controller Shield. No es necesario, ni se debe, conectar ningún otro tipo de alimentación al conector de alimentación del Arduino.
El Arduino UNO se puede alimentar también (cuándo no tiene otra fuente externa) a través del conector del interfaz USB. Por ello si conectamos el Arduino al ordenador mediante el cable USB veremos que se enciende pero no funcionarán los motores ni el resto de la impresora.
Para instalar la alimentación primero conectaremos el cable de alimentación al Printer Controller Shield. Utilizaremos para ellos dos cables (rojo y negro) suficientes para aguantar 12V-2A. Atención a la polaridad.

Como fuente de alimentación hemos utilizado un alimentador externo de 12V-2A.
Atención: NO CONECTAR TODAVIA EL ALIMENTADOR A LA IMPRESORA.

Es recomendable instalar un microinterruptor de reset. Existen dos pines en la PCB del Controller Shield pensados para ello. Simplemente hay que soldar unos cables al interruptor poner dos pines hembra en el otro extremo y conectarlo a la PCB.
Ya tenemos instalado el cableado y la alimentación.
