
TwinTeeth - Instalar la electrónica y el cableado
En este capítulo vamos instalar la electrónica y el cableado.
Twinteeth utiliza un Arduino Mega 2560 y una Ramps 1.4. Esta última contiene entre otras cosas los controladores de los motores de pasos Pololu A4988. La Ramps es una tarjeta controladora de bajo coste que fue diseñada para la impresora 3D RepRap. Junto con el Arduino Mega proporcionan la mayor parte de la electrónica que necesita TwinTeeth. Sólo el Cabezal láser utiliza un circuito adicional (PickupDriver) que tiene la función de hacer de interfaz entre el PHR-803T y el Arduino. Este capítulo no cubrirá este circuito porque lo describiremos más adelante en el capítulo "Ensamblar el Cabezal Láser".
Primero tienes que darle la vuelta al bastidor y apoyarlo en la mesa, con el triángulo superior en la parte de abajo y el eje Z apuntando hacia ti. Vamos a instalar la electrónica debajo del triángulo inferior.
Instalando los microinterruptores de fin de carrera
Si no los instalaste en capítulos anteriores, este es el momento de hacerlo.
TwinTeeh fue diseñado para usar microinterruptores del tipo DB sub-minuatura con terminales rectos y sin actuador auxiliar. Puedes utilizar cualquiera de esta serie porque la corriente máxima que pasará a través de él será de unos pocos mA y una tensión de 5V.

Estos microinterruptores suelen tener tres terminales marcados como C (común), NC (normalmente cerrado) y NO (normalmente abierto).

El terminal del centro del microinteruptor es normalmente el NO (normalmente abierto) y no lo usaremos.
Suelda un cable en cada uno de los terminales NC y C (ver siguiente foto).
Mediante un cutter o similar repasa el alojamiento del microinterruptor de uno de los ejes e introducelo en él.
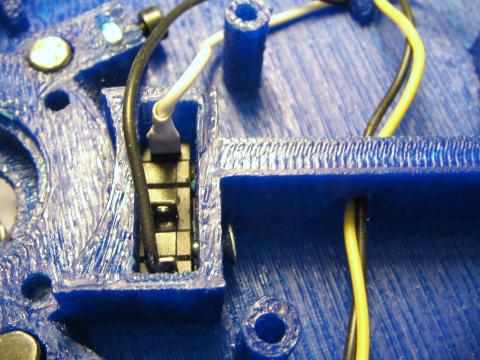
El microinterruptor tiene que quedar a ras de la superficie superior del vértice, con el pequeño actuador (normalmente de color rojo) sobresaliendo ligeramente. Ten en cuenta que el microinterruptor se puede instalar en dos posiciones. La correcta es cuando el actuador está perfectamente centrado entre los dos ejes de acero (ver siguiente foto).
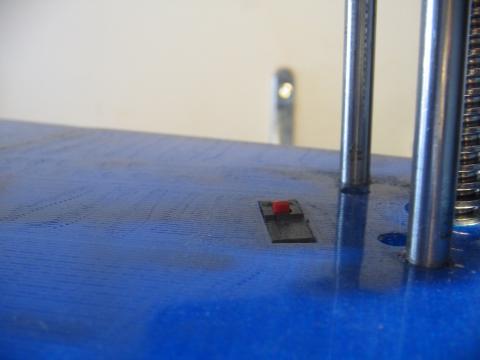
Gira el husillo con la mano hasta que el carro alcance la posición inferior y comprueba que el tornillo de ajuste acciona el microinterruptor.

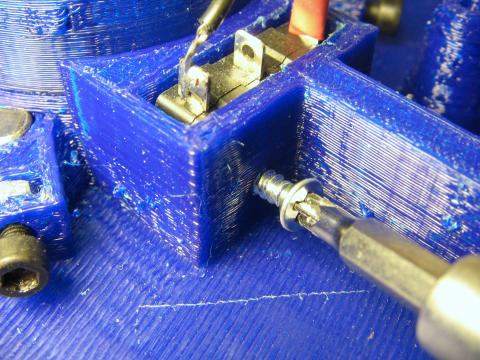
Usando dos pequeños tornillos M2 o M2.5 de rosca chapa, sujeta el microinterruptor de fin de carrera en su alojamiento.

Repite estos pasos con los otros microinterruptores.
Instalando el Arduino y la Ramps
Ahora vamos a instalar el Arduino Mega en los soportes previstos en el propio triángulo. Se puede instalar en varios sitios pero recomendamos hacerlo a la derecha del triángulo (ver siguiente foto).

Pon el Arduino encima de los soportes y comprueba que los agujeros de la PCB coinciden con los de los soportes. Usa cuatro tornillos rosca chapa o madera de 2.5x10mm y atornilla la PCB del Arduino a los soportes.
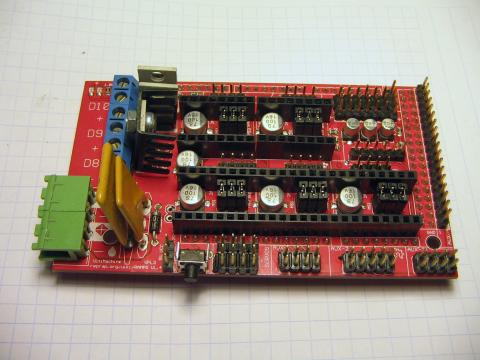
Ahora vamos a preparar la Ramps.
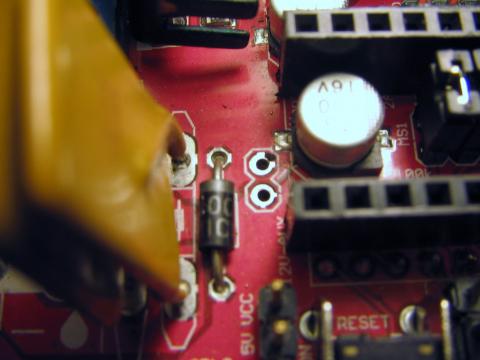
Primero suelda dos pines macho en el conector marcado como "12V-Aux" (ver siguiente foto). La mayoría de las Ramps no lo trae soldado y lo necesitaremos para conectar el ventilador de refrigeración (ver esquema del cableado más abajo).
Comprueba también que todos los Jumpers que configuran los micropasos están instalados. TwiTeeth utiliza 1/16 micropasos.
Ahora instala la Ramps en el Arduino, con cuidado de insertar todos los pines correctamente y a la vez, para no doblarlos.

Localiza los drivers de los motores de pasos.
Necesitarás tres drivers para los motores X,Y,Z y un driver adicional que es compartido por el extrusor 3D y el dispensador de pasta de soldar (en caso de que los vayas a utilizar)
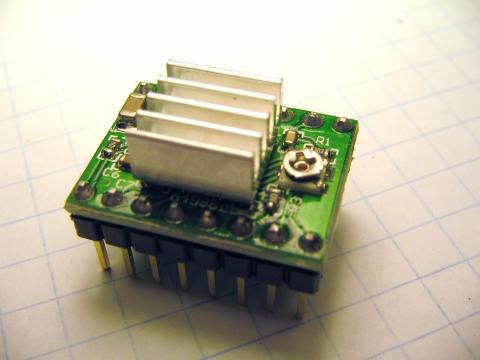
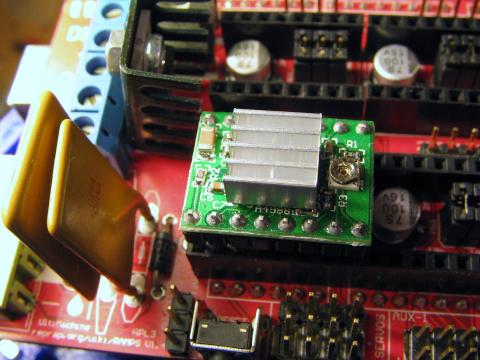
Antes de instalar los drivers, pega el pequeño radiador al A4988.
Luego inserta los drivers en las posiciones X,Y,Z de la Ramps. Inserta por último el driver extra en la posición E0 (si lo vas a usar).
Atención: cuidado al instalar los drivers en la Ramps porque si los instalas mal puedes destruirlos. También los puedes destruir si conectas/desconectas los motores mientras está la alimentación encendida.
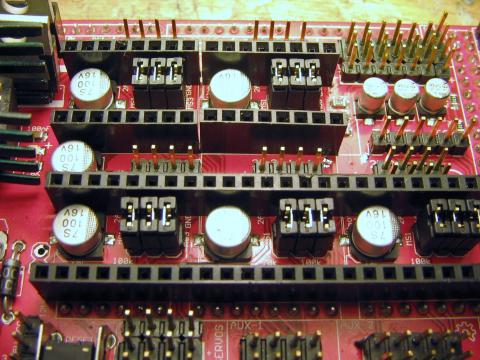
Si miras a la Ramps con los fusibles amarillos a tu izquierda, la posición correcta es con el pequeño potenciómetro de ajuste apuntando a la derecha (ver siguiente foto).
Cableando la electrónica
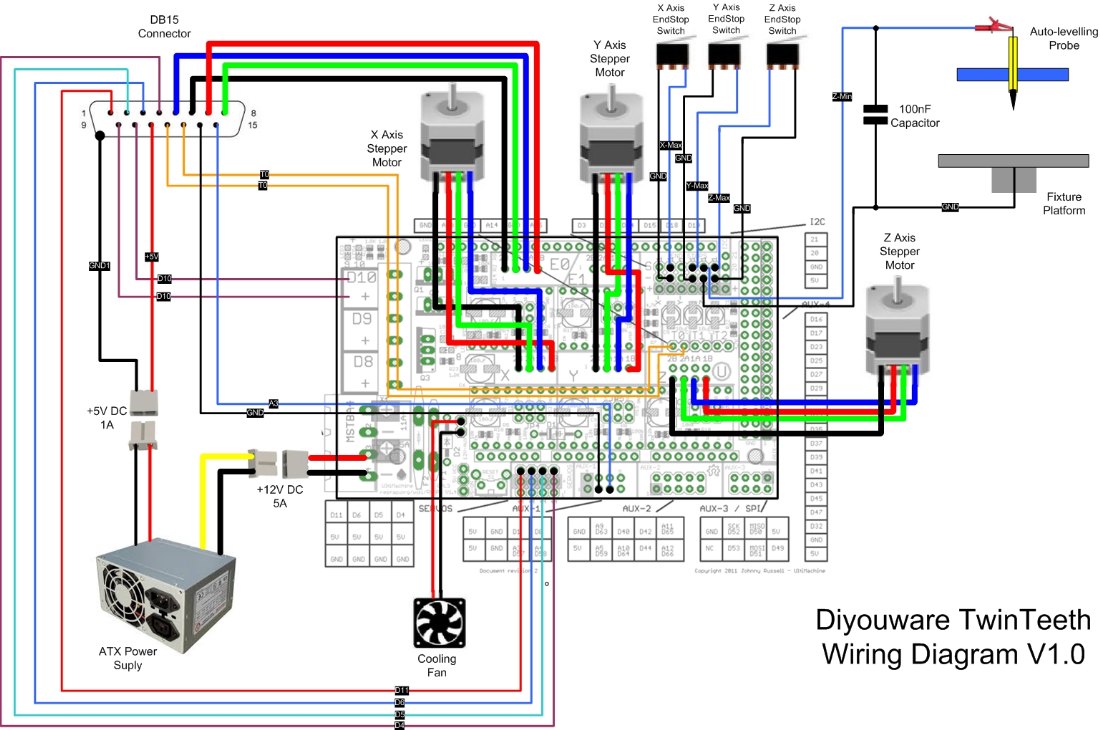
Antes de instalar el cableado echa un vistazo al siguiente diagrama:
Si no lo hiciste anteriormente ahora es el momento de pasar los cables por el tubo del eje Z.
Necesitarás instalar 15 cables, CAT5 o similar. Cualquier cable flexible de red Ethernet o similar servirá. La máxima corriente que soportara cada cable será 1A en los 4 cables del motor del extrusor 3D. El resto soportarán solo unos pocos mA.
Instala también un cable apantallado de 1 vía para la señal FE. Nosotros hemos usado un cable de auricular.
Te recomendamos que instales un pasacables en el agujero del tubo por donde sale el cableado para evitar que se dañen.

Instalando el conector DB15
Todos estos cables van desde la Ramps, situada en la parte inferior del bastidor, al conector DB15 que instalaremos en la parte superior. Este conector se usa para enchufar los diversos cabezales soportados por TwinTeeh.
La siguiente tabla muestra una descripción completa de los pines y funciones del conector.
| DB15 | Cabezal | Arduino/Ramps | Entrada/Salida | Señal | Descripción |
|---|---|---|---|---|---|
| 1 | Láser | D11 | Salida | SEL1 | SEL1 y SEL2 permiten apagar y encender los diodos láser (UV, Red e IR) |
| 2 | Láser | D5 | Salida | Lens servo | Señal PWM para mover el servo de la lente de enfoque. |
| 3 | Láser | D6 | Salida | Láser power | Señal PWM para controlar la corriente del diodo y su potecia. |
| 4 | Láser | D4 | Salida | SEL2 | SEL1 y SEL2 permiten apagar y encender los diodos láser (UV, Red e IR) |
| 5 | 3D Printer/Paste Dispenser | E0-1A | Salida | Stepper 1A |
Fase 1-A del motor de pasos. |
| 6 | 3D Printer/Paste Dispenser | E0-2B | Salida | Stepper 2B | Fase 2-B del motor de pasos. |
| 7 | 3D Printer/Paste Dispenser | E0-1B | Salida | Stepper 1B | Fase 1-B del motor de pasos. |
| 8 | 3D Printer/Paste Dispenser | E0-2A | Salida | Stepper 2A | Fase 2-A del motor de pasos. |
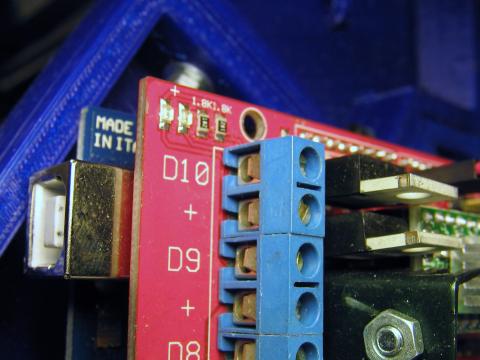
| 9 | 3D Printer | D10 | Salida | Calentador | Calentador del hot-end |
| 10 | 3D Printer | D10 | Salida | Calentador | Calentador del hot-end |
| 11 | Láser | N/A | N/A | +5V | +5V directos desde la fuente de alimentación |
| 12 | 3D Printer | T0 | Entrada | Termistancia | Termistancia del hot-end |
| 13 | 3D Printer | T0 | Entrada | Termistancia | Termistancia del hot-end |
| 14 | Láser | GND | N/A | GND | Masa analógica del Pickup Driver (se utiliza la pantalla del cable FE) |
| 15 | Láser | A3 | Entrada | FE | Señal de Focus Eror (FE) |
| Carcasa DB15 | Láser | N/A | N/A | GND1 | Masa digital del Pickup Driver (directo de la fuente de alimentación) |
Ahora vamos a instalar el conector. Gira de nuevo la impresora y colócala en su posición habitual.

Localiza la Cubierta del Husillo que pertenece al eje Z (ver siguiente foto) y usando un cutter o una lima repasa el alojamiento del tubo eliminando el "pie de elefante", etc.
Comprueba que encaja bien en el tubo.
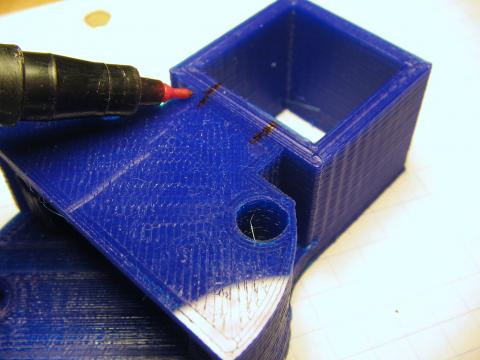
Pon la Cubierta del DB15 en su posición, sobre la Cubierta del Husillo, y marca con un rotulador dos líneas en el alojamiento del tubo, justo dónde la cubierta del DB15 lo toca (ver siguiente foto).
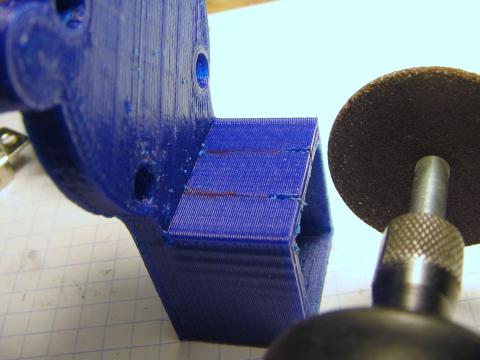
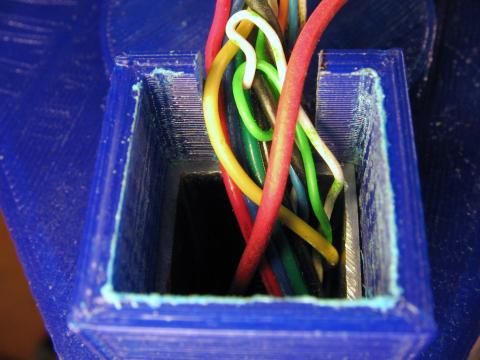
Utiliza un minitaladro con el accesorio adecuado para cortar un hueco en la Cubierta del Husillo (ver siguiente foto). El cableado pasará a través de este hueco en dirección al conector DB15.
Pasa ahora los cables a través del alojamiento del tubo y del hueco que acabas de hacer. Luego desliza la Cubierta del Husillo en el tubo de aluminio.
Atornilla la Cubierta del Husillo al triángulo mediante dos tornillos M3x16mm por los agujeros frontales de la Cubierta. Luego atornillaremos en la parte de atrás los otros dos tornillos que pasan a través de la Cubierta del DB15. No olvides atornillar también la Cubierta del Rodamiento que está debajo del triángulo.
Localiza el conector DB15 y su cubierta.

Comprueba que el conector encaja perfectamente en ella. Usa un cutter o una lima si fuese necesario.
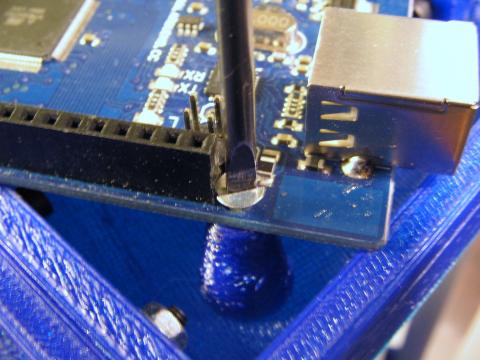
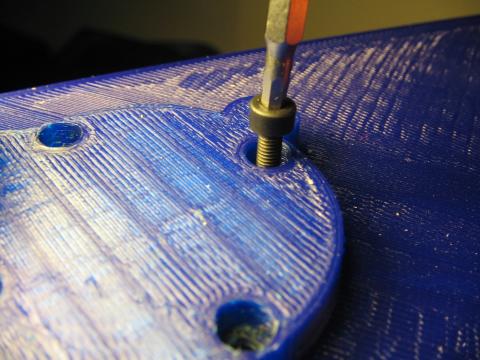
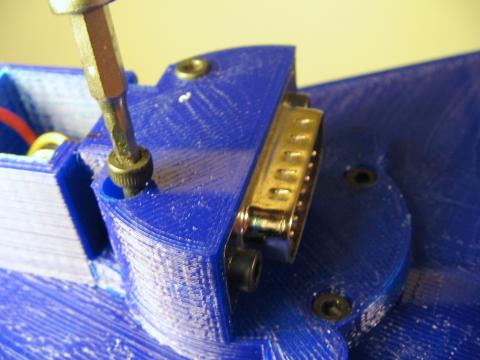
Con el soldador, inserta las dos tuercas M3 que sujetarán el conector a la cubierta (ver siguiente foto)

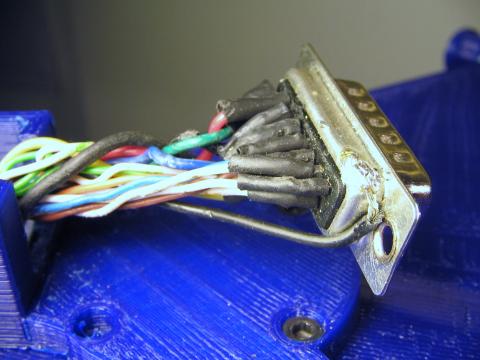
Ahora es el momento de soldar los cables al conector. Es recomendable usar termoretractil para aislar las soldaduras y los pines.
Ten en cuenta que el cable GND1 va soldado directamente a la carcasa metálica del conector, y que el cable de la sonda de auto-nivelado no va soldado al mismo y que hay que dejarlo algo más largo.
Es recomendable apuntar en un papel la configuración de los pines, los colores de los cables y dónde van soldados, para futura referencia.
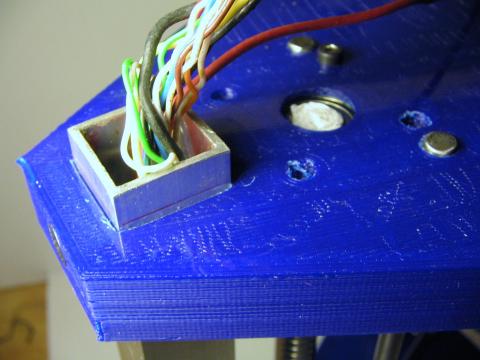
Ahora instala el conector en la cubierta. Tira ligeramente de los cables desde el agujero de la parte inferior del tubo Z hasta que los cables encajen en el hueco de la cubierta del DB15 y el tubo.
Atornilla el conector a su cubierta con dos tornillos M3x8mm.

Usando dos tornillos M3x20mm, atornilla también la Cubierta del DB15 al triángulo, a través de los agujeros de la Cubierta del Husillo.
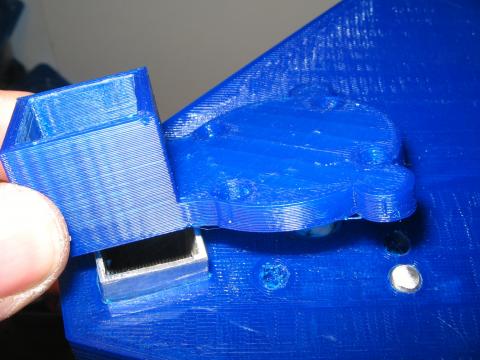
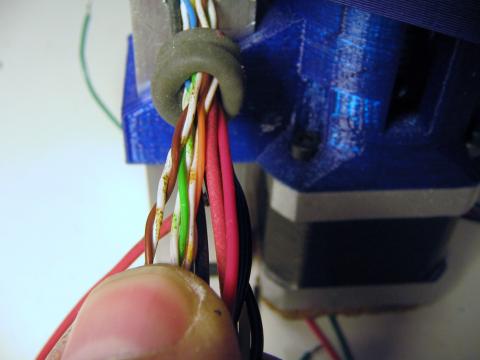
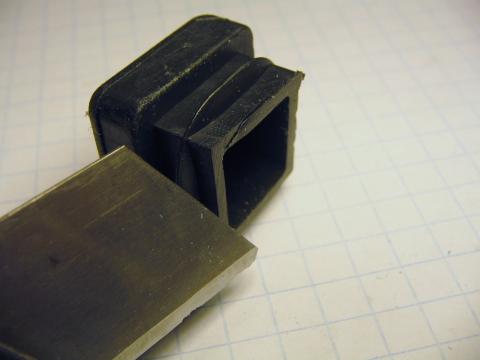
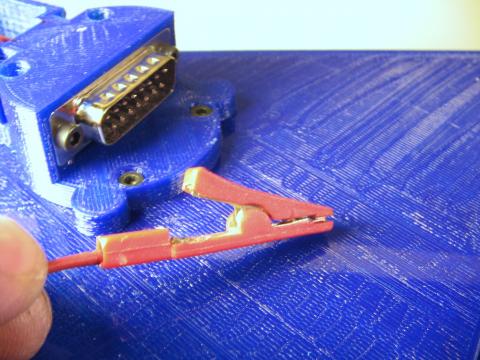
Localiza una pata de plástico y con un cutter corta la parte inferior (ver foto)
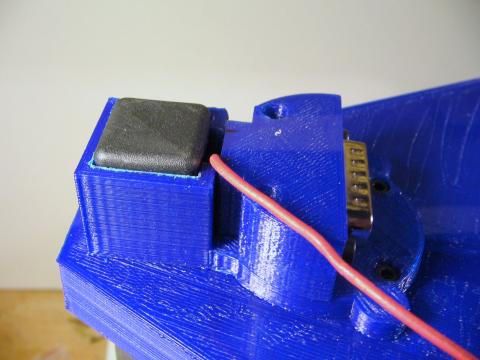
Inserta la pata de plástico en la Cubierta del Husillo y el tubo Z. Deja pasar el cable de la sonda de auto-nivelado (color rojo en la foto) por el hueco que hiciste en la cubierta.
Ahora continuaremos en la parte de abajo del bastidor. Dale la vuelta de nuevo.
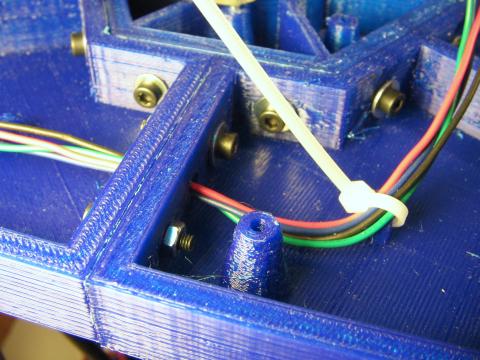
En la parte de abajo del triángulo inferior verás que hay unos agujeros pasacables y unos soportes para atar bridas. Son para organizar mejor el cableado. Si decides usarlos inserta los cables antes de soldar los conectores, ya que luego no entrarán por los agujeros.
Ahora vamos a soldar los conectores hembra en el otro extremo del cableado, en el lado que conectarán a la Ramps.
Necesitarás:
- Conector hembra de 4 pines para el driver de motor E0 (cables del extrusor 3D, ver más abajo el diagrama)
- Conector hembra de 4 pines para las señales D11,D6,D5,D4 del Pickup Driver
- Conector hembra de 2 pines para el cable apantallado que va a A3/GND (señal FE del Pickup Driver)
- Conector hembra de 2 pines para el cable T0 (termistencia del hot-end)
Tendrás que soldar también:
- Conector de 2 pines para los cables de +5V/GND1 que vienen de la fuente de alimentación y van al DB15.
- Conector hembra de 2 pines para el ventilador. Este ventilador es opcional, pero recomendamos su uso para refrigerar los drivers.
Por último ajusta la longitud de los cables de los microinterruptores de fin de carrera y suelda un conector hembra de 2 pines en cada uno.
Recomendamos usar termoretractil para aislar todas estas conexiones.
No es necesario soldar conectores en los cables del calentador del hot-end, ya que se conectan a la clema D10 de la Ramps.
Cableando los Motores de Pasos
Los tres motores de pasos NEMA17 suelen venir con cables lo suficientemente largos para conectarlos directamente a la Ramps. En caso contrario tendrás que alargarlos (o acortarlos).
Comprueba la información técnica del modelo de motor que vayas a usar para determinar el esquema de cableado y el color de los cables. Las diferentes fases del motor tienen que ir conectadas a las señales 2B,2A,1A,1B de la Ramps. Cada fabricante de motores usa un esquema diferente y colores de cables diferentes así que a veces es algo confuso.
Nosotros usamos motores Wantai 42BYGHW609 con el siguiente cableado:
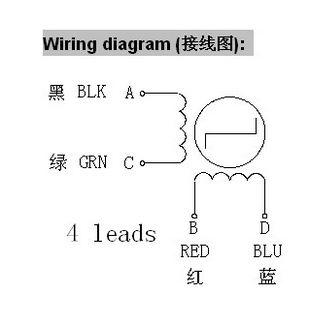
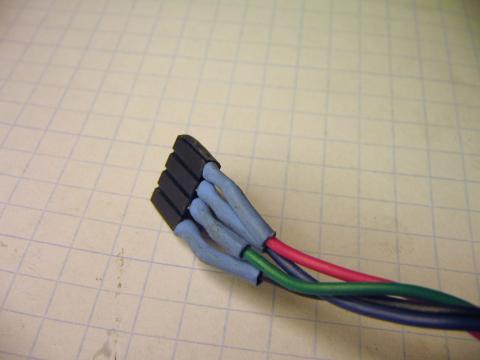
Suelda un conector hembra de 4 pines a los cuatro cables de cada motor en el orden correcto.
Cableando la Sonda de Auto-nivelado
El sistema de auto-nivelado de la plataforma utiliza una sonda (ver la parte derecha del diagrama de cableado) que toca la plataforma de aluminio cerrando un circuito. La sonda y la plataforma van conectadas a la entrada Z-Min del fin de carrera del eje Z. La sonda se usa durante la fase de calibración para tomar algunos puntos de referencia sobre la plataforma. Luego el firmware utiliza dicha información para auto-nivelar la plataforma automáticamente.
Para instalar la sonda necesitarás los siguientes materiales:
- 1 cable en espiral de auricular de teléfono o similar
- 1 cable flexible CAT5 o similar de 1 metro de longitud. Este cable es para la sonda y ya estará instalado por el tubo Z
- 1 conector macho de 1 vía ( el hembra ya lo instalamos debajo de la plataforma)
- 1 conector hembra de 2 pines.
- 1 condensador cerámico de 100nF
- 1 pinza de cocodrilo pequeña.
Primero suelda el conector de una vía en uno de los extremos del cable en espiral.

Inserta el otro extremo del cable a través del agujero del Hexágono Inferior, desde la parte superior a la inferior, y llévalo cerca del área de la Ramps para conectar los Endstops.
Conecta el otro extremo con el conector macho al conector hembra de la plataforma.

Suelda un conector de 2 pines hembra al otro extremo del cable en espiral y de la sonda. Suelda el condensador de 100nF entre los dos cables. Este condensador es para evitar señales espurias.
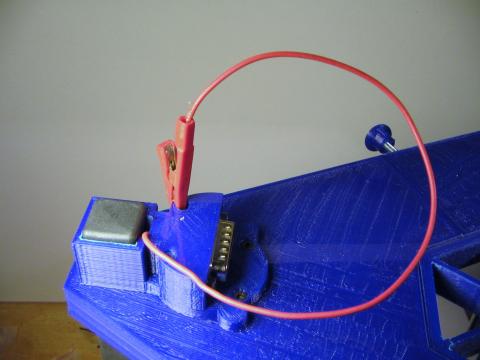
Finalmente suelda la pinza de cocodrilo al otro extremo del cable de la sonda.
Usaremos esta pinza de cocodrilo para conectar el cable a la sonda. Por el momento puede sujetarla en uno de los agujeros de la cubierta del DB15.
Conectando el cableado a la Ramps
Una vez todo el cableado esté listo es el momento de conectarlo a la Ramps.
Primero conecta los motores de pasos X,Y,Z. Ten cuidado de enchufar los conectores en el orden correcto: 2B,2A,1A,1B

Luego conecta los cables de los microinterruptores de fin de carrera. La Ramps tiene seis conectores previstos para conectar fines de carrera y detectar las posiciones máxima y mínima para los tres ejes: X,Y,Z. Están agrupados en la parte superior derecha y marcados como X-, Y- y Z- (estos son los de la posición min, los equivalentes para max están entre ellos. Luego los pines están marcados como S (signal), - (GND) y + (5V).
La mayoría de máquinas CNC e impresoras 3D utilizan los fines de carrera instalados en el inicio del eje (min) para determinar la posición inicial (home) pero como TwinTeeth es un robot delta en configuración invertida, utilizaremos los de fin del eje (max).
Conecta ahora cada cable de los fines de carrera en el conector Max. de su respectivo eje X,Y,Z. Los conectores tienen que ir a los pines S y (-)
Atención: si conectas los fines de carrera de forma incorrecta puedes provocar un cortocircuito en el Arduino y destruirlo. Es fácil hacerlo si los conectas en los pines marcados como + y -, en vez de S y -. Hay que enchufarlos a los pines marcados con un cuadrado blanco en la siguiente foto.
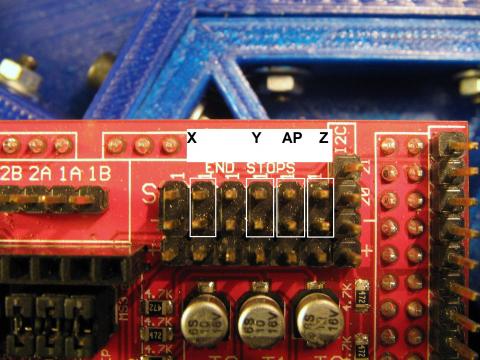
El conector marcado como AP de la foto anterior es el Z-Min dónde conectaremos la sonda.
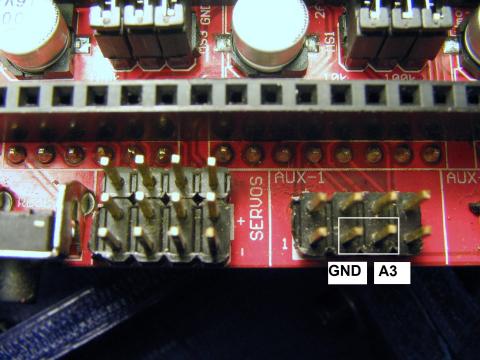
Conecta también el cable apantallado de la señal FE en su posición (GND y A3) del conector Aux-1 (ver siguiente foto)
Conecta también los cables D11-D4 del Cabezal Láser en la zona de los servos según la siguiente foto.

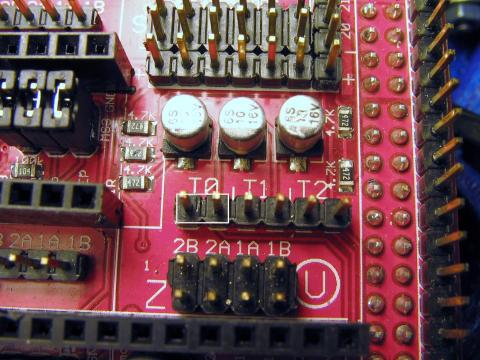
Ahora conecta el cable de la termistancia del hot-end en los pines marcados como T0.
Inserta los cables del calentador del hot-end en la clema D10 de la Ramps y aprieta los tornillos.
Si vas a usar el ventilador (recomendable) busca un sitio para instalarlo y conéctalo a la Ramps en los pines que soldaste anteriormente.

Por último comprueba dos veces que todo está bien conectado. Es importante porque cualquier error puede destruir la electrónica.

Cableando la fuente de alimentación
La mejor fuente de alimentación para TwinTeeth probablemente es cualquier fuente ATX de un PC viejo. TwinTeeth utiliza dos voltajes: +12V y +5V. Estas fuentes los proporcionan y con suficiente amperaje para alimentar la electrónica y los motores.
La línea de +12V es utilizada para alimentar la Ramps, el Arduino, los motores, el hot-end, etc. Tienes que conectar estos cables al conector-clema de color verde de la Ramps, marcado con 5A-12V. Cuidado con la polaridad (ver siguiente foto)

La línea de +5V es usada para alimentar el Driver del Pickup, instalado en el Cabezal Láser. Esta línea va directamente de la fuente de alimentación al conector DB15. No alimentes el driver directamente desde el Arduino o la Ramps porque podrías destruir el Arduino por exceso de consumo. Además el Arduino es algo ruidoso y puede inducir ese ruido eléctrico en el circuito del láser que es muy sensible.
Sobre todo ten cuidado con la polaridad de los cables y también ten en cuenta que hay dos masas: una marcada como GND que se obtiene del Arduino a través del cable blindado de la señal FE, y otra GND1 que va directamente de la fuente de alimentación (a través del tubo de aluminio) a la carcasa del conector DB15. Es importante mantener estas dos líneas así para evitar que se cuele ruido en el Driver del Pickup.
Antes de usar la fuente tendrás que adaptarla. Echa un vistazo a este tutorial sobre Fuentes de Alimentación para RepRap para aprender cómo hacerlo. Ten en cuenta que el tutorial sólo muestra cómo obtener las líneas de +12V (cable amarillo) ya que la RepRap sólo usa ese voltaje. Nosotros necesitamos además una línea de +5V (cable rojo)
No uses la señal de +5VSB (stanby) del cable violeta en vez de la señal +5V (cable rojo) porque la primera siempre tiene corriente, independientemente de que la fuente esté apagada o encendida, y sólo proporciona 10mA. Cualquier cable rojo de +5V servirá.
Recomendamos usar un conector de 4 vías o dos de 2 vías para poder enchufar/desenchufar la fuente al robot.
Atención: NO conectes todavía la fuente de alimentación, tampoco lo hagas hasta comprobar que los drivers de los motores están bien instalados, el cableado correcto y el firmware cargado en el Arduino. Lo haremos más tarde, en siguientes capítulos.
Construyendo la Sonda de Auto-nivelado
El sistema de auto-nivelado utiliza una sonda construida con un rotulador reciclado y una punta conductora. La sonda se conecta al Arduino a través de la pinza de cocodrilo y del cable que instalamos a través del tubo Z.
La sonda actúa como un microinterruptor, cerrando el circuito cuando toca la plataforma de aluminio. De esta forma TwinTeeh puede medir con precisión la distancia de la punta a la plataforma en algunos puntos de referencia. Luego utilizamos estos puntos para auto-nivelar la plataforma automáticamente.
Ahora vamos a construirla. Necesitarás los siguientes materiales:
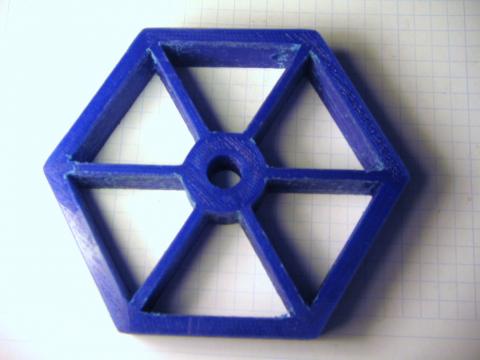
- 1 pieza 3D "Hexágono del Rotulador"
- 1 rotulador gastado, de 9.5mm de diámetro
- 1 punta de metal conductor
- 1 trozo de cable de cobre de 1mm de diámetro (70mm de largo)
- 1 x gota de ciano
Para la punta conductora puedes usar un pin de un conector pequeño, una punta afilada de multimetro, un cable de cobre afilado o algo similar. Tendremos que soldar un cable a ella, así que es conveniente que sea de algún metal fácil de soldar.
Primero comprueba que el rotulador encaja bien en el agujero del hexágono y usa una broca de 9.5mm si fuese necesario.
Ahora, utilizando una pequeña sierra de metal, corta el rotulador aprox. a 40-50mm de la punta.
Con unos alicates quita el cartucho de tinta y la punta. Si quedan resto de tinta límpiala con alcohol o acetona.
Suelda el cable de cobre a la punta conductora e introduce el cable por el agujero de la punta del rotulador. Encaja finalmente la punta conductora en el agujero y haz un bucle en la otra parte del cable para sujetar luego la pinza de cocodrilo.
Finalmente pega la punta con una gota de ciano y comprueba con el muiltimetro que hay conectividad.

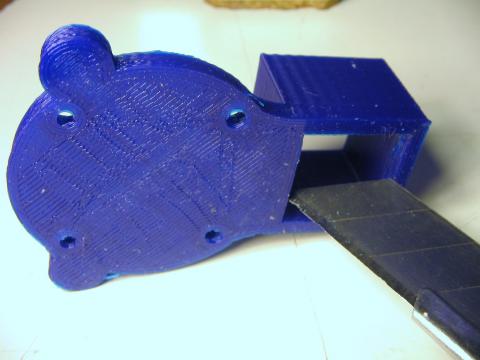
Comprueba que la sonda entra en el agujero del hexágono.
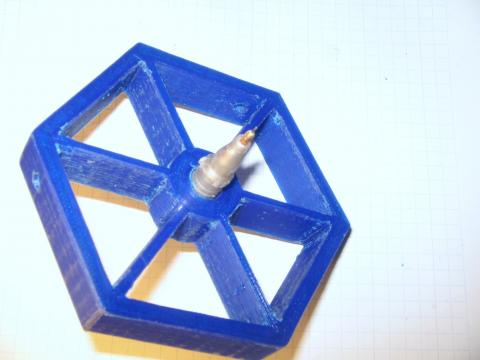
La sonda está terminada.
Es muy fácil usarla: simplemente hay que instalar el hexágono en TwinTeeth y conectar la pinza de cocodrilo al cable. Lo haremos más tarde, cuando calibremos TwinTeeth.
Puedes usar como sonda otras cosas: por ejemplo una broca sujeta a un mini-taladro (parado por su puesto). Simplemente hay que sujetar la pinza a la broca para que al tocar la plataforma cierre el circuito.
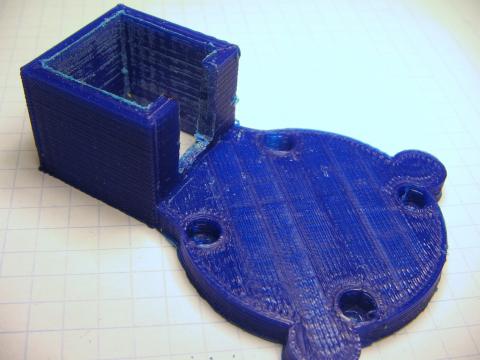
Casi lista
Después de instalar el cableado y la sonda, TwinTeeth está casi lista. Tendrá el aspecto de las siguientes fotografías:




En los próximos capítulos instalaremos el software, la encenderemos por primera vez y la calibraremos.
Capítulo anterior Indice Home Siguiente capítulo