
TwinTeeth - Instalar el software
Instalando el software
Atención: No conectes todavía la fuente de alimentación.
En este capítulo sólo vamos a cargar el firmware en el Arduino y puedes hacerlo simplemente conectando el cable USB a tu ordenador.
El software usado por TwinTeeth está compuesto por el código que se instala en el Arduino (firmware) y el software que se instala en tu ordenador. Ambos están conectados a través de un puerto USB y un cable.
Si no lo hiciste antes, descarga ahora los archivos zip. Antes echa un vistazo a las Release Notes de la última versión.
TwinTeeth
| Categoría | Componente | Comentarios | Ficheros |
|---|---|---|---|
| Software | TwinTeeth Firmware V2.1 | Ultima versión del Firmware de TwinTeeth, compatible con TwinTeethMC V2.3 | Descargar |
| Software | TwinTeeth Firmware V2.0 | Versión anterior del Firmware de TwinTeeth, compatible con TwinTeethMC V2.2 | Descargar |
| Software | TwinTeeth Firmware V1.0 | Firmware de TwinTeeth basado en Marlin | Descargar |
| Herramientas | Arduino IDE V1.6.1 | Entorno de desarrollo de Arduino | Descargar |
Servidor (PC)
| Categoría | Componente | Comentarios | Ficheros |
|---|---|---|---|
| Software | TwinTeeth Management Console V2.3 | La última versión de la consola de control que nos permite manejar TwinTeeth Firmware V2.1 | Descargar |
| Software | TwinTeeth Management Console V2.2 | Versión anterior de la consola de control que nos permite manejar TwinTeeth Firmware V2.0 | Descargar |
| Software | TwinTeeth Management Console V1.0 | La consola de control que nos permite manejar TwinTeeth (versión obsoleta) | Descargar |
| ULP | TwinTeeh Eagle's ULPs V2.0 | Ultima versión del ULP de Eagle para generar los ficheros g-code de taladrado y dispensado de pasta de soldar. | Descargar |
| ULP | TwinTeeh Eagle's ULPs V1.0 | Versión anterior del ULP de Eagle para generar los ficheros g-code de taladrado y dispensado de pasta de soldar. | Descargar |
| Herramientas | Xloader 1.0 | Utilidad para cargar TwinTeeth Firmware en el Arduino Mega. | Descargar |
| Eagle Cadsoft 6.1 o superior | Programa CAD de diseño electrónico. | Descargar | |
| Processing 3.0 | Ultima versión de Processing: el entorno de programación con el que hemos desarrollado TwinTeeth Management Console V2.3 | Descargar | |
| Processing 2.2.1 | Versión anterior de Processing compatible con TwinTeeth Management Console V2.2 | Descargar | |
| ControlIP5 V2.2.5 para Processing. | Ultima versión de la ibrería gráfica para Processing 3.0 | Descargar | |
| ControlIP5 V2.0.4 para Processing. | Librería gráfica para Processing 2.2.1. | Descargar | |
| Ghostscript 9.15 | Librerías Postcript que utiliza TwinTeeth Management Console para tratar este tipo de ficheros. | Descargar | |
| Ghost4J 0.5.1 | Librerías Java para Postcript que utiliza TwinTeeth Management Console para tratar este tipo de ficheros. | Descargar | |
| PCB-Gcode | Por si deseas generar ficheros G-code desde esta herramienta (opcional) | Descargar |
Te recomendamos crear un directorio llamado TwinTeeth para centralizar la instalación, dondequiera que desees, por ejemplo en C: \Usuarios\MiUsuario\TwinTeeth.
Lo referenciaremos como <TwinTeeth> en el resto del tutorial.
Arduino IDE
El IDE de Arduino es el entorno de desarrollo que utiliza el Arduino para desarrollar el software.
Lo usaremos para modificar, compilar y cargar el firmware de TwinTeeth. Por defecto se instala en C:\Program Files\Arduino.
Para instalarlo en tu ordenador, sigue las instrucciones de la página web de Arduino Es mejor utilizar el instalador de Windows que el archivo zip porque el instalador registra automáticamente el software.
Xloader
XLoader es una herramienta muy útil para cargar el firmware en el Arduino.
Para instalarla sólo tienes que descomprimir el fichero XloaderV1.0.zip en el directorio <TwinTeeth>\XLoader.
También puedes cargar el firmware mediante el IDE de Arduino, así que Xloader es opcional.
Eagle CadSoft
Eagle es una popular herramienta de CAD electrónico que tiene una versión gratuita con algunas limitaciones:
- El área utilizable está limitada a 100 x 80 mm (4 x 3.2 pulgadas).
- Sólo se pueden usar dos capas de señal (superior e inferior).
- Sólo se puede crear una hoja de esquema.
Descarga de su web la última versión de Eagle y sigue las instrucciones para instalarla en tu PC.
Hemos desarrollado varios ULPs (User Language Program) para Eagle y los instalaremos más tarde.
Processing
Processing es un entorno de programación fácil de usar basado en Java. Lo hemos usado para desarrollar TwinTeeh Management Console: el software que se ejecuta en tu PC y que permite controlar el robot.
Processing es multiplataforma. Se ejecuta en Windows, Mac y Linux, y en teoría, todo el software desarrollado con él también lo es. Pero no lo hemos probado, ni certificado. Por lo tanto sólo soportamos Windows.
Instálalo en el directorio <TwinTeeth>\Processing.
Crea también un directorio en <TwinTeeth> llamado Sketchbook.
Ahora vamos a configurar Processing para que use dicho directorio.
Abre el menú File->Preferences.
Verás que aparece una venta similar a esta:

Cambia el campo "Sketchbook Location" a <TwinTeeth>\Sketchbook. Recuerda que <TwinTeeth> es realmente la ruta del directorio raíz donde instalaremos el software de TwinTeeth.
Pulsa OK y cierra Processing (Ctrl-Q). Luego, vuelve a ejecutarlo para que arranque de nuevo y detecte el nuevo directorio. Tiene que crear en él otros directorios que utiliza para organizar los ficheros.
Cierra de nuevo Processing con Ctrl-Q.
ControlIP5
ControIP5 es una librearía gráfica para Processing. Tienes que descargarla desde esta página web.
Instala la versión 2.2.5 o superior que es compatible con Processing V3.0.
Tienes que instalar la librería en el directorio <TwinTeeth>\Sketchbook \libraries.
Sigue las instrucciones que dan en la página web.
Ghostscript
Ghostscript es un programa que interpreta el lenguaje PostScript (TM) y que además convierte dicho formato a otros formatos.
Lo utilizamos para leer los ficheros que genera Eagle con los diseños de los circuitos.
Descarga Ghostscript 9.15 for Windows (Affero licence) y ejecuta el .exe de instalación. Un asistente te guiará en el proceso. Normalmente se instala en in C:\Program Files\gs\gs9.15
Importante: una vez instalado tienes que añadir la ruta C:\Program Files\gs\gs9.15\bin a la variable Path del sistema. Puedes hacerlo pulsando con el botón derecho en icono Equipo (del escritorio) y luego acceder a Propiedades del Sistema y pinchando en el botón Variables de Entorno aparecerán dichas variables. Edita la variable Path y añade la ruta donde se instaló el programa al final, después de un punto y coma.
Ghost4J
Ghostscript fue desarrollado en lenguaje C, pero nosotros hemos usado Java para desarrollar la consola de TwinTeeth. Así que necesitamos alguna librería que haga de puente entre lenguaje C y Java. Ghost4J es esa librería y básicamente permite llamar a las funciones de Ghostscript desde código desarrollado en Java.
Vamos a instalarla a continuación:
Primero crea un directorio llamado ghost4j en <TwinTeeth>\sketchbook\libraries
Luego crea otro dentro de <TwinTeeth>\sketchbook\libraries\ghost4j llamado library
Descomprime el fichero con la librería en dicho directorio.
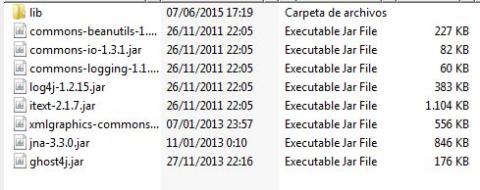
Verás que dentro de library creará otro directorio llamado lib y un fichero llamado ghost4j-0.5.1.jar.
Importante: copia todo el contenido del directorio lib a <TwinTeeth>\sketchbook\libraries\ghost4j\library
Por último renombra el fichero ghost4j-0.5.1.jar por ghost4j.jar
Al final tendrás los siguientes ficheros en el directorio <TwinTeeth>\sketchbook\libraries\ghost4j\library:
PCB-Gcode
PCB-Gcode es un ULP para Eagle que genera G-code a partir de los diseños de los circuitos. Es útil por ejemplo para grabar el circuito con una fresadora y una broca en v directamente en el cobre . En TwinTeeh usamos Postcript en vez de G-code ya que imprimimos con el láser en modo raster, así que PCB-Gcode es opcional. Si deseas instalarlo sigue las instrucciones de su página web.
Instalando el Software de TwinTeeth
Una vez hemos instalado todas las herramientas y librerías vamos a instalar el propio software de TwinTeeth.
Descomprime el fichero .zip de TwinTeeth Management Console V2.3 e instálalo en <TwinTeeth>\Sketchbook. Allí es donde Processing lo buscará.
Crea también un directorio para almacenar los ficheros de los diseños de los circuitos, por ejemplo <TwinTeeth>\Sketchbook\PCBFiles
Ahora vamos a comprobar que todo funciona bien.
Arranca Processing pinchando en su icono.
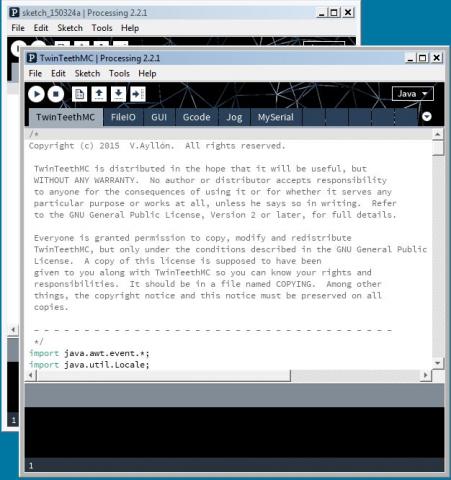
Abre el menú File y selecciona Sketchbook->TwinTeethMC
Verás que se abre una ventana con el código fuente de la Consola de Control de Twinteeth.
Ahorca haz click con el ratón en el botón![]() para ejecutar el programa.
para ejecutar el programa.
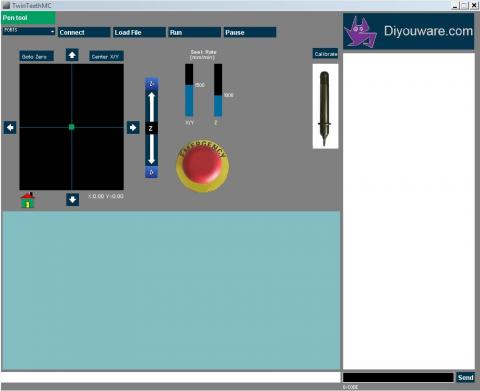
Verás que aparece la pantalla principal de la consola de control.
Si no aparece, entonces algo fue mal durante la instalación. Vuelve atrás y comprueba que todo se instaló bien y en el directorio correcto. Mira en la parte de abajo de la ventana de Processing. A veces indica el error que se ha producido.
Si la consola se arrancó sin problemas, entonces ciérrala (pinchando en la cruz de la parte superior de la ventana). De momento no la necesitaremos. La usaremos más tarde cuando terminemos de cargar el firmware en el Arduino.
Compilando y cargando el Firmware
Ahora vamos a compilar el firmware y a cargarlo en el Arduino.
Primero descomprime el fichero del firmware (si no lo has hecho ya) en el directorio <TwinTeeth>\TwinTeethFirmware.
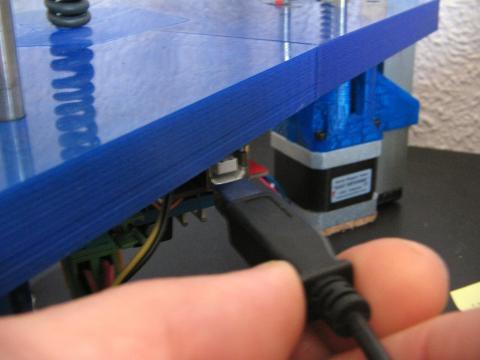
Luego conecta tu ordenador con el Arduino con un cable USB.
Ejecuta el IDE del Arduino pinchando en su icono. Verás que aparece la siguiente ventana.

Ahora vamos a configurar el IDE del Arduino. Necesitarás indicarle la tarjeta que estás usando, el procesador y el puerto COM.
Ve al menú Herramientas y selecciona Placa->Arduino Mega o Mega 2560.
Luego en Herramientas->Procesador selecciona Atmega2560 (Mega 2560).
Finalmente en Herramientas->Puerto selecciona el puerto COM donde el Arduino Mega esté conectado. Si no te aparece ninguno, enchufa y vuelve a enchufar el cable USB.
Ahora el Arduino estará conectado a tu ordenador.
El siguiente paso es cargar el firmware en él, pero antes hay que compilarlo.
Abre el menú Archivo y selecciona Abrir...(Ctrl-O). Aparecerá una ventana de selección de archivos.
Ve al directorio donde instalaste el firmware, es decir, <TwinTeeth>\TwinTeethFirmware y abre el fichero TwinTeethFirmware.pde. Suele ser el último de la lista.
Aparecerá la siguiente ventana.
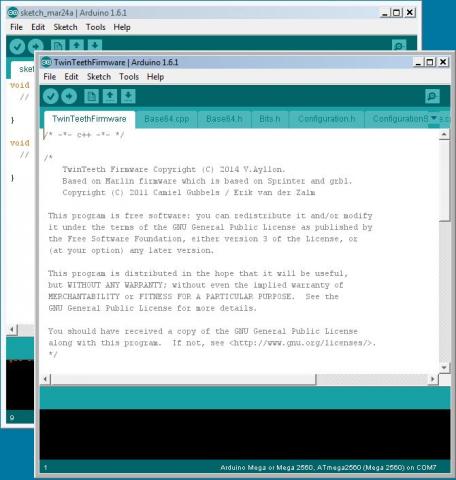
En la parte de arriba verás algunas pestañas con los nombres: TwinTeethFirmware, Base64.cpp, Base64.h, etc.. Son los diferentes ficheros de código fuente del firmware. El más importante desde el punto de vista de la configuración es Configuration.h. Volveremos a él cuando calibremos la impresora, pero de momento vamos simplemente a compilar y a cargar el firmware tal y como está.
Haz click con el ratón en el botón ![]() .
.
Este botón inicia el proceso de compilación y cuando termina carga automáticamente el firmware en el Arduino a través del puerto USB.
Al pulsarlo verás que al rato los leds de TX/RX del Arduino empiezan a parpadear. Significa que ya se está cargando el firmware en el Arduino. El proceso tarda algunos segundos.
Una vez cargado aparecerá un mensaje en la parte inferior de la ventana indicando que se terminó el proceso de carga, el número de bytes que se cargaron, etc. En caso contrario aparecerá uno o varios mensajes de error indicando qué sucedió.
Conectando con TwinTeeh
Ahora vamos a intentar arrancar la consola de control de TwinTeeth y a conectarnos con él.
Antes de conectar asegúrate que no hay otro programa conectado al mismo puerto, por ejemplo el IDE del Arduino.
Luego ejecuta Processing.
Verás que aparece la pantalla de arranque de Processing.
Abre el menú File y luego Sketchbook->TwinTeethMC.
Verás de nuevo el código del programa.
Pincha con el ratón en el botón ![]()
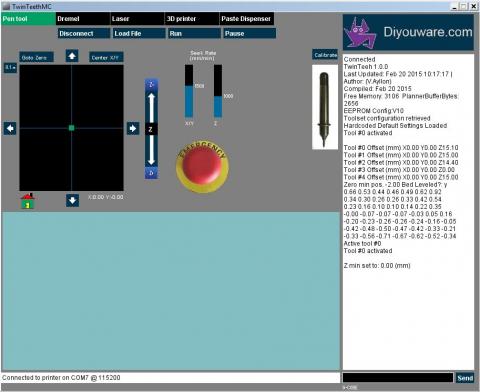
Verás que aparece la pantalla principal de la consola.
Para conectar con TwinTeeth primero tienes que seleccionar el puerto COM (arriba a la izquierda) y luego pinchar en el botón Connect.
En unos segundos aparecerá en la ventana de la derecha los mensajes de bienvenida de TwinTeeth y su configuración. En la parte de abajo de la consola parecerá el mensaje "Connected to Printer on COMX @ 1115200".
Significa que estás conectado a TwinTeeth.
En próximos capítulos explicaremos con detalle cómo usar la consola. De momento es suficiente con comprobar que te puedes conectar a TwinTeeth con ella, ya que significa que el proceso de instalación fue bien.
No intentes usar los controles de la consola y mover TwinTeeth; no se moverá porque no tiene enchufada la fuente de alimentación. Sólo se está alimentando con los +5V que le suministra el cable USB.
Conectaremos la fuente más tarde, cuando comencemos la fase de calibración.
Instalando los ULPs de Twinteeth para Eagle
Los programas de usuario de Eagle o ULP (User Language Program) son pequeños trozos de código escrito en una sintaxis parecida a la del lenguaje C que pueden utilizarse para acceder a las estructuras de datos de Eagle, y así, crear una amplia variedad de archivos de salida, a partir de los diseños de los circuitos. Estos programas utilizan la extensión .ulp. y tienen que instalarse en un directorio que se configura en el Panel de Control de Eagle.
Ejecuta Eagle y ve al Control Panel (panel de control). Abre el menú Options->Directories y aparecerá la siguiente ventana.
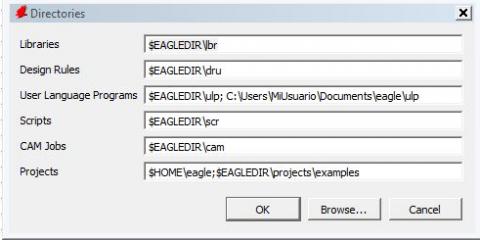
En el campo User Language Programs aparecerá el directorio donde hay que instalar los ULPs.
Descomprime en dicho directorio el fichero TwinTeethULPV2.0.zip.
Verás que se crean en él un directorio llamado twinteeth-resources y un fichero twinteeth.ulp.
Ahora vamos a comprobar que funcionan correctamente.
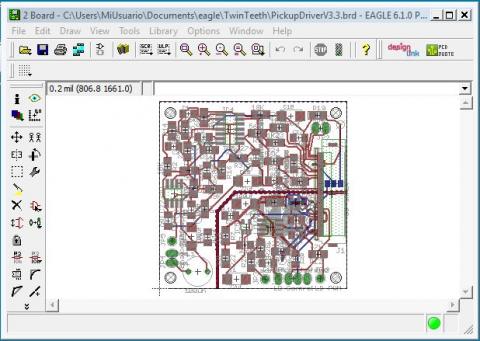
Arranca Eagle y abre cualquier circuito y/o placa. Para poder ejecutar el ULP tienes que cambiar al modo placa (board).
Los ULPs se ejecutan pulsando en el icono ![]() (comando Run).
(comando Run).
Aparecerá un selector de ficheros. Ve al directorio donde se instaló el .zip y abre el fichero twinteeth.ulp
Verás la siguiente ventana:
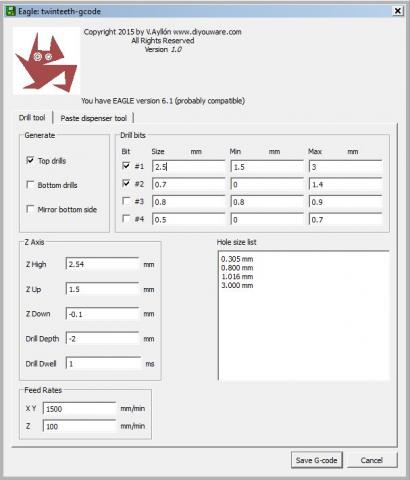
La ventana tiene dos pestañas: una con los parámetros de taladrar y la otra con los de dispensar pasta de soldar. Una vez configurados los parámetros hay que pulsar en el botón Save G-code que genera los ficheros. Estos normalmente se suelen almacenar en el propio directorio del proyecto Eagle.
En próximos capítulos describiremos como se usan estos programas con más en detalle. De momento es suficiente con comprobar que funcionan bien.
El sofware que necesita TwinTeeth está instalado y listo. El próximo paso será calibrar el robot.
Capítulo anterior Indice Home Siguiente capítulo