
TwinTeeth - Calibrar el robot
En este capítulo vamos a encender y calibrar el robot. Por favor lee antes los siguientes consejos de seguridad.
Seguridad lo primero
Algunos componentes electrónicos utilizados por TwinTeeth (drivers de los motores, Mosfets, reguladores de tensión, etc.) generan calor. Algunos de ellos utilizan un radiador de aluminio que puede quemar la piel cuando lo tocas. Por favor ten cuidado y mantenlos alejados de materiales inflamables.
También debes tener cuidado cuando el robot esté funcionando porque los husillos y demás piezas móviles pueden lastimarte las manos.
El robot es un equipo eléctrico así que también deberás tomar las medidas de precaución necesarias para manejar este tipo de dispositivos.
El Sistema de Coordenadas
Aunque TwinTeeth es un robot delta tiene tres ejes (X, Y, Z) como los robots cartesianos tradicionales.
Cuando en capítulos anteriores ensamblamos el robot, nombramos a las tres guías lineales y pilares con las letras X, Y, Z correspondientes a cada eje. Pero en realidad estos son ejes sólo desde el punto de vista del firmware. A partir de ahora llamaremos ejes a los ejes cartesianos 3D del área de trabajo, y llamaremos guías a los ejes o guías lineales.
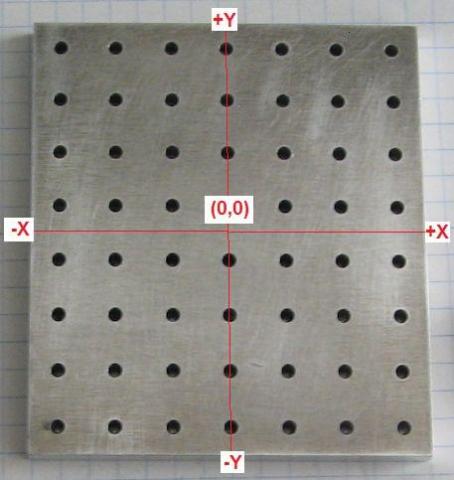
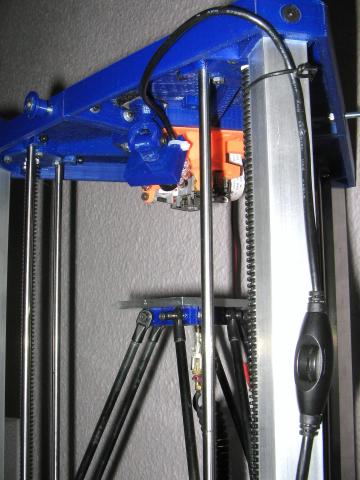
Si miras al robot con la guía lineal X a tu izquierda y la guía lineal Y a tu derecha, entonces la plataforma estará delante de ti con el lado largo apuntando hacía la guía lineal Z, que estará al fondo. El lado largo de la plataforma (80mm) es el eje cartesiano Y. El lado corto (70mm), que va de izquierda a derecha, es el eje cartesiano X. El eje vertical es el eje Z. El origen (0,0) de los ejes X,Y está en el centro de la plataforma, donde se encuentran las dos líneas.
Antes de calibrar el robot vamos a dibujar algunas marcas de alineación en la plataforma.
Desconecta el cable en espiral de la plataforma, afloja los tornillos que unen la plataforma al Effector y retira la plataforma de él.
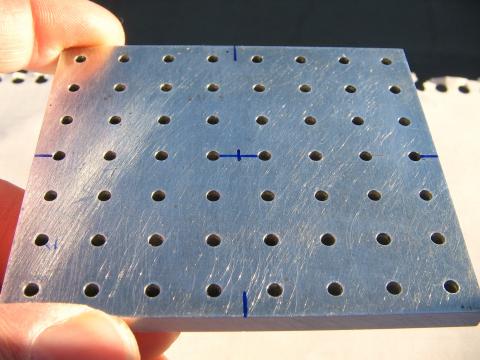
Utiliza una regla y un rotulador permanente de punta fina para dibujar algunas marcas en la mitad de cada lado de la plataforma (ver imagen siguiente). Las líneas deben cruzarse en el centro de la plataforma. Marca allí una pequeña cruz. Después de calibrar el robot puedes quitar todas estas marcas con acetona o alcohol.
Instala la plataforma de nuevo y apunta el lado más largo (eje Y) al husillo del fondo (guía Z). No olvides conectar de nuevo el cable en espiral.

TwinTeeth utiliza un diseño delta invertido, esto significa que el origen del eje Z está en la parte superior. Las coordenadas positivas del eje Z se extienden por lo tanto hacia abajo, aproximadamente 60mm por debajo de esa posición. La posición de Home se encuentra en la parte inferior del robot. Así que tenemos la posición cero (0,0,0) en la parte superior y la posición de Home en la parte inferior.
La posición cero (superior) puede ser diferente para cada cabezal porque cada uno puede usar puntas o brocas de diferente longitud. El área de trabajo máxima dependerá del cabezal instalado pero será de aprox. 70x80x60mm (X, Y, Z).
Encendido de TwinTeeth
Vamos encender el robot por primera vez pero antes tenemos que ajustar los drivers de los motores.
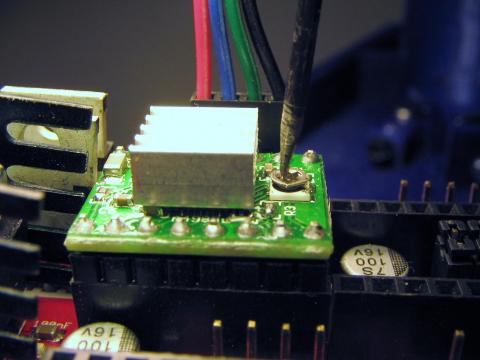
Tienen un pequeño potenciómetro para poder ajustarlos (los vimos en capítulos anteriores). Controlan la corriente que reciben los motores de pasos. Si lo giras en el sentido de las agujas del reloj aumentarás la corriente y los motores y drivers se calentarán. En sentido contrario disminuirás la corriente y se enfriarán. Los potenciómetros tienen menos de 360 grados de rotación. Ten cuidado de no forzar el final (una pequeña pestaña de metal).
Como punto de partida ajusta los potenciómetros de los drivers a un 25% de su recorrido desde su izquierda (ver imagen siguiente)

Ahora vamos a comprobar por última vez si todo está bien:
- Ramps firmemente instalada en el Arduino.
- Drivers de los motores de pasos correctamente instalados.
- Potenciómetros a aprox. 25% desde el inicio.
- Todos los conectores instalados en sus posiciones correctas, clemas con los tornillos apretados.
- Los microinterruptores de fin de carrera y los cables de la sonda de autonivelado están correctamente conectados a la Ramps.
- Fuente de alimentación: +12V conectada a la Ramps, conector orientado correctamente, +5V conectada a los cables que van al DB15.
- Cable USB conectado al Arduino.
- Firmware cargado.
- Ningún cabezal instalado.
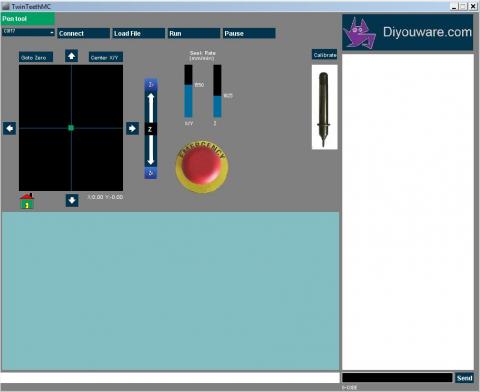
Ejecuta Processing y abre el sketch TwinTeethMC. Una vez abierto haz clic en el botón Run para ejecutarlo. Verás la siguiente pantalla:
Enciende la fuente de alimentación. No pasará nada, eso está bien. Pero si los motores comienzan a moverse, desconecta rápidamente la alimentación eléctrica porque algo va mal.
Si no se mueven, selecciona el puerto COM en TwinTeethMC y pulsa el botón de conectar. Si te has conectado a TwinTeeth entonces vamos bien.
Verás un gran botón rojo de emergencia en el centro de la pantalla. No dudes en hacer clic con el ratón en él para parar el robot si ves que algo anda mal. Este botón realiza un reset del Arduino via software así que no hay ninguna garantía de que el robot siempre se detenga pero también puedes detenerlo desconectando la fuente de alimentación o pulsando el botón de reset del Arduino.
Si no puedes conectar con TwinTeeth, desconecta el cable USB, conéctalo de nuevo y vuelve a intentarlo.
Funcionamiento básico de TwinTeethMC
Ahora vamos a aprender a usar algunas funciones básicas de TwinTeethMC.
Ya sabes cómo seleccionar el puerto COM y conectarte con el robot. En el lado superior de la pantalla también puedes ver la barra de menú. A su izquierda verás el puerto COM y el botón Connect.

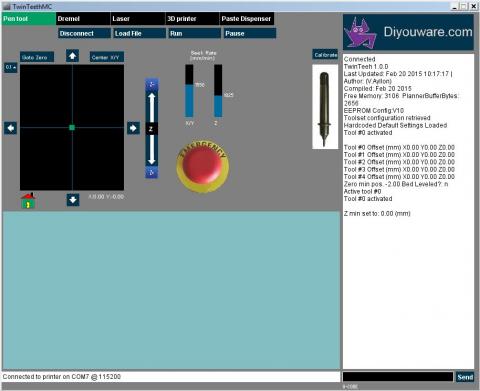
Una vez conectado, verás que cambia la barra de menús y aparecerán encima algunos botones nuevos con las etiquetas de los cabezales soportados (ver imagen siguiente).

El menú con los cabezales permite seleccionar la herramienta a utilizar. Por el momento sólo utilizaremos el Pentool, que se usa para el rotulador o la sonda de calibración.
Desconectarse del robot es tan sencillo como pulsar el botón Disconnect.
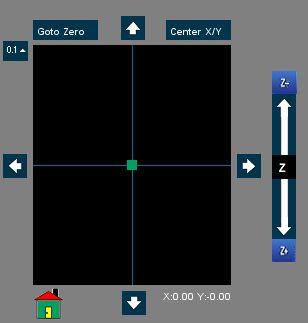
En el centro de la pantalla verás los siguientes controles:
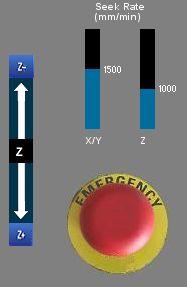
Sobre el botón de emergencia verás dos controles deslizantes. Te permiten establecer la velocidad de los ejes. A la derecha está el control de velocidad del eje Z. Como punto de partida configúralo en aprox. 1.000 mm/min. A su izquierda verás el control de velocidad X/Y. Muévelo hasta aproximadamente 1.500 mm/min.
A la izquierda del botón de emergencia está el control de movimiento del eje Z. Permite mover la plataforma hacia arriba o hacia abajo. Si vas con el ratón sobre él (no pulses todavía), verás que las flechas cambian indicando el número de milímetros que la plataforma se moverá cuando hagas clicl. Si ahora haces clic en cualquiera de esos botones, verás que el robot no se moverá y aparecerá el siguiente mensaje en la ventana de la derecha: "Error: Printer stopped after being calibrated. Home axes (G28) before continue."
Esto significa que no puedes mover los ejes hasta que pulses el botón de Home. Verás este mensaje cada vez que intentes moverlo después de haberlo encendido, al seleccionar una herramienta diferente o después de calibrar el robot.
Botón de Home
El botón de Home o inicio está representado por una casa verde (ver siguiente imagen)

Cuando pulses en él se iniciará la secuencia de Home o inicio. Todos los carros se moverán hacia abajo hasta que el primero de ellos toque el interruptor de fin de carrera. A continuación, se moverán hacia abajo otra vez por turnos, activando de nuevo los interruptores con más precisión.
Si alguno de los ejes (o todos) no se mueven o no se detienen al tocar el interruptor, o se mueven hacía arriba en vez de hacia abajo, para rápidamente el robot pulsando en el botón de emergencia porque algo está mal.
Ahora haz clic en el botón de Home y a ver qué pasa.
Si alguno de los ejes no se movió, detén la operación, desconecta la alimentación y comprueba el potenciómetro de los drivers. Muévelos un poco hacia la derecha para aumentar la corriente. Comprueba también que los muelles de los carros están bien ajustados y no bloquean los ejes.
Si alguno de ellos no se detuvo al tocar el interruptor, desconecta la alimentación y comprueba que el interruptor está correctamente instalado y conectado a la Ramps.
Si cualquiera de los ejes (o todos) subieron en vez de bajar, entonces probablemente los conectores de los motores están en una posición incorrecta. Desconecta la alimentación, desconecta los motores y vuelve a conectarlos en la posición correcta.
Los primeros pasos
Una vez que el robot ha hecho Home puedes mover la plataforma.
Haz clic en el control del eje de Z para mover la plataforma hacia arriba o hacia abajo, y familiarizarte así con el control de movimiento del eje Z.
Si subes el eje Z varias veces, verás que alcanzas el límite superior y no serás capaz de ir más allá. Hay un límite superior general para el robot y límites superiores particulares para cada cabezal, porque todos ellos tienen diferentes longitudes. Más tarde los ajustaremos.
Ajustando los drivers de los motores
Aunque el robot ya se mueve, tienes que ajustar los drivers de los motores porque el ajuste inicial no es suficiente.
Hay varias maneras de hacerlo. Uno es calcular y medir una tensión de referencia con un multímetro. El otro es un método empírico que consiste en mover el eje hacia arriba y hacia abajo y ajustar los potenciómetros según veamos cómo se comportan los motores y los drivers. Describiremos este último que es más fácil y rápido.
Necesitarás un destornillador pequeño, preferiblemente de cerámica.
Dale la vuelta a TwinTeeth para tener mejor acceso a los drivers.
Ten en cuenta que el potenciómetro es muy sensible y pequeños movimientos causan grandes cambios.
Primero vamos a buscar los límites de los drivers. Pulsa en Home y haz lo siguiente en cada uno de los drivers de los tres motores.
Mueve el eje Z arriba/abajo varias veces. Mientras se está moviendo ajusta el potenciómetro en sentido antihorario hasta que el motor se detenga. Este es el límite inferior. Al alcanzarlo, el motor no recibirá suficiente corriente, perderá pasos y finalmente se detendrá. Toma nota de la posición del potenciómetro. Mueve el potenciómetro a la posición inicial (aprox. 25%) y pulsa en Home otra vez.
Ahora mueve de nuevo el eje Z arriba/abajo y continúa moviendo el potenciómetro hacia la derecha hasta que el motor empiece a tartamudear, sólo para comprobar el límite. Cuando tartamudea, o se detiene, significa que el A4988 está demasiado caliente y se desconecta para proteger la electrónica. Gíralo de nuevo hacia la izquierda, más o menos a la mitad de camino entre el punto cuando empezó a moverse bien y cuando empezó a tartamudear. Mueve el eje arriba/abajo otra vez y comprueba con el dedo la temperatura del radiador. Si está caliente entonces mueve un poco hacia la izquierda. Si está frío entonces un poco en sentido horario hasta que esté templado.
Prueba varias veces moviendo el eje Z arriba/abajo y repite estos pasos con todos los drivers hasta que estén ajustados y los motores no pierdan pasos.
Instalando la Cámara
Te recomendamos que instales la cámara antes de iniciar el proceso de calibración porque te ayudará a hacerlo con más precisión.
La cámara es fundamental para imprimir PCBs de alta densidad porque es difícil apreciar sus detalles de un vistazo. Ayudará en una variedad de táreas: calibrar del robot, determinar con precisión la posición de inicio, inspeccionar en detalle la calidad del trabajo, ver cómo evoluciona, etc.
Hemos diseñado tres anclajes de cámara en el triángulo superior pero realmente no son muy útiles. Hemos visto que es mejor instalar la cámara debajo del triángulo superior usando un trozo de Velcro auto-adhesivo. Es una solución más flexible porque la cámara se puede mover fácilmente de lugar. Y si accidentalmente la plataforma choca con ella se separará del velcro sin dañar nada.
La cámara que hemos elegimos para TwinTeeh es una cámara CMOS de 50 Megapixeles y 6 LEDs blancos que se pueden controlar con un regulador. También tiene un micrófono incorporado.
Para instalar la cámara necesitarás los siguientes materiales:
- 1 x Cámara USB
- 1 x Pieza 3D Camera Plate
- 1 x Pieza 3D Camera Hinge
- 1 x Pieza 3D Camera Fork
- 1 x Pieza 3D Camera Tulip
- 1 x Tornillo M3 - 8mm
- 1 x Tornillo M3 - 12mm
- 1 x Tornillo M3 - 25mm
- 2 x Tuerca M3
- 1 x Tuerca M3 autoblocante
- 1 x Arandela M3
- 1 x Pieza de 20x20mm de Velcro autoadhesivo
- 3 x bridas de 10mm x 100mm
- Algunas gotas de cyanocrilato

En primer lugar, usando el soldador, inserta una tuerca M3 en la parte 3D que hace de bisagra (Hinge)
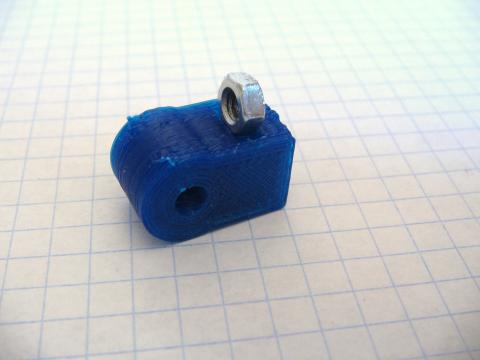
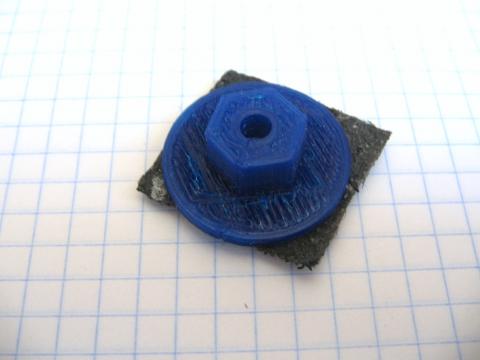
Inserta otra tuerca M3 en la tulipa (ver siguiente foto)
Pega la banda de Velcro de 20x20mm en la tulipa.
Inserta un tornillo de M3x12mm a través del orificio de la horquilla (Fork)

Comprueba que la bisagra y la horquilla funcionan bien. Inserta el tornillo M3x25mm y mueve el mecanismo de la bisagra varias veces hasta que ajuste bien, luego retira el tornillo.

Atornilla la horquilla a la tulipa con el tornillo M3x12mm.

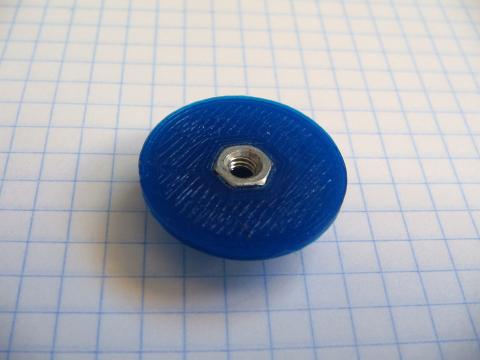
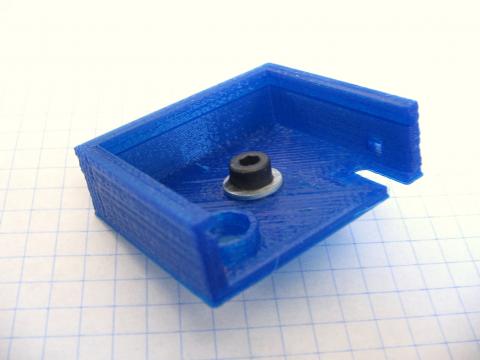
Luego inserta el tornillo M3x8mm y la arandela M3 a través del agujero del centro del soporte de la cámara (Plate). Pone una gota de cianocrilato en el tornillo y la arandela para pegarlos al plástico y que no se muevan.
Usando una lima redonda, repasa el alojamiento del micrófono.
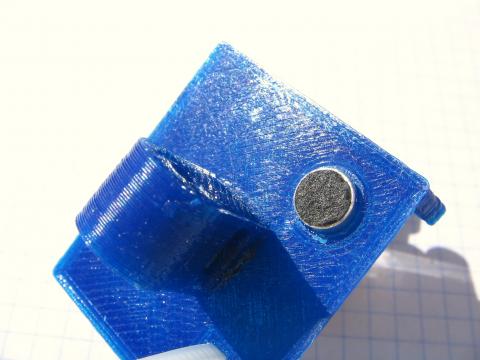
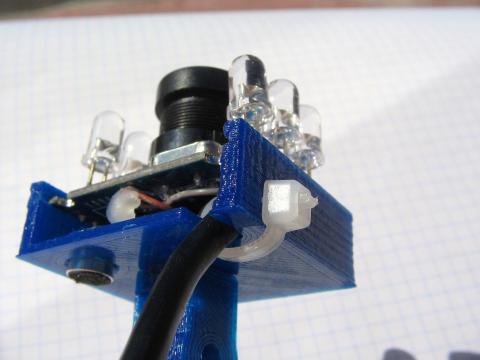
Toma la cámara e inserta cuidadosamente el micrófono en su alojamiento. Atornilla también la bisagra al soporte de la cámara (ver siguiente foto)
Desliza el cable de la cámara a través de la ranura que hay en el lado derecho del soporte. Inserta una brida de 10x100mm a través de los orificios rectangulares.
Pega un pedazo de cinta adhesiva en la parte trasera de la PCB de la cámara (para sujetar los cables y protegerla) y desliza suavemente el circuito impreso por las ranuras laterales del soporte.

Aprieta la brida y corta el sobrante.
Fija la bisagra a la horquilla con un tornillo M3x25mm y una tuerca M3 autoblocante. Aprieta la tuerca hasta que haya cierta fricción entre las piezas.
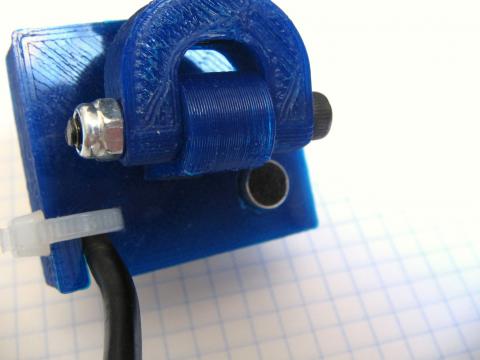
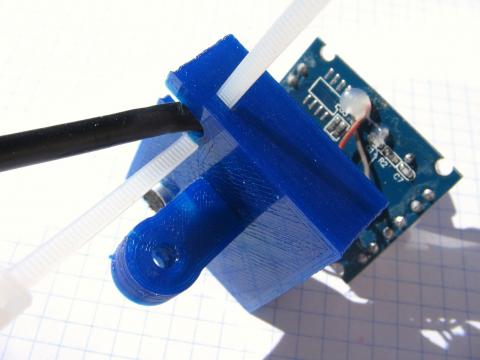
Hemos terminado. La cámara y el soporte tendrán este aspecto:

Ahora vamos a instalarla en TwinTeeth.
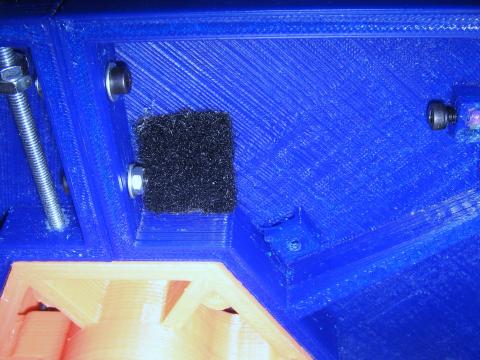
Pega la otra banda de Velcro en la parte de abajo del triángulo superior. Te recomendamos que lo pegues en el vértice Y, en la parte delantera del robot (ver la siguiente foto).
Ahora sólo tienes que pegar allí la tulipa con la otra parte del Velcro.
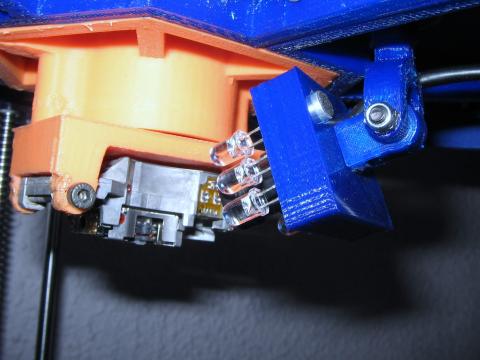
Apunta la cámara hacia la punta de la herramienta (o el punto del láser) justo donde toca la superficie de la plataforma. Asegúrate también de que la cámara no supera por debajo el límite de la plataforma, de lo contrario la plataforma la golpeará.
Usando dos bridas 10x100mm fija el cable de la cámara al pilar más cercano.
El cable incorpora un regulador de la intensidad de los LEDs. Déjalo accesible para poder atenuar la intensidad de la luz o apagarla.
En el extremo del cable verás dos conectores: un conector USB y otro tipo Jack. Conecta el conector USB al ordenador.
El conector tipo Jack es la salida de audio. Conéctalo a la entrada de audio de tu ordenador (opcional).
Si el ordenador no detecta la cámara probablemente necesitarás instalar los drivers. Puedes descargártelos aquí.
Ahora ejecutar en tu ordenador el programa de la cámara y enfoca la lente girándola con el dedo.

La cámara está lista.
Calibrando el robot
Por fin vamos a calibrar el robot.
Si seguiste las instrucciones, utilizaste los materiales adecuados y las medidas recomendadas, o compraste los kits en nuestra tienda, entonces el proceso de calibración será tan fácil como ajustar los tornillos de los fin de carrera, alinear y nivelar la plataforma, comprobar que el robot se mueve con precisión y configurar el (0,0,0) de cada herramienta. Si cambiaste algo en el diseño del robot, entonces tendrás que ajustar algunos parámetros en el firmware, compilarlo y cargarlo otra vez en el Arduino.
Nuestra recomendación es la siguiente: construye el robot con la mayor precisión posible. Lo más importante es que las tres guías lineales estén equidistantes. Imprimir con precisión los vértices 3D te garantizará esto. La distancia real entre las guías es menos importante que todas estén equidistantes porque podemos corregirlo más tarde en el firmware. Las seis varillas delta tienen que tener la misma longitud. De nuevo: la longitud exacta es menos importante que las varillas sean todas de igual longitud.
Ahora vamos a comprar si funciona la sonda.
Comprobando la sonda
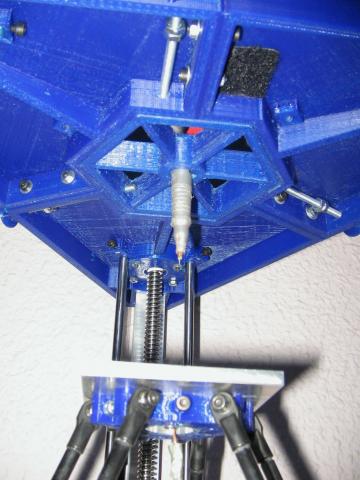
Instala el Cabezal del Rotulador con la sonda de autonivelado. La sonda debe sobresalir por la parte inferior del hexágono unos 40mm. Coloca la pinza de cocodrilo en el cable de la sonda.
Vamos a comprobar si la sonda de autonivelado funciona bien.
Primero sube el eje Z varias veces hasta que la plataforma llegue a la punta de la sonda. En el último centímetro mueve el eje Z de milímetro en milímetro y en último milímetro en décimas de milímetro, para evitar romper la sonda (en caso de que no funcione). Luego sube la última décima de milímetro hasta que la plataforma toque la sonda y comprobar que el robot se detiene. Verás en la ventana de TwinTeethMC a tu derecha un mensaje diciendo que se alcanzó el fin de carrera. Si la plataforma no se paró o no apareció el mensaje, entonces hay algo mal conectado. Desconecta la pinza y toca con ella la plataforma para comprobar si el problema está en la sonda o en el cableado. Una vez que el problema esté identificado y resuelto empieza de nuevo.
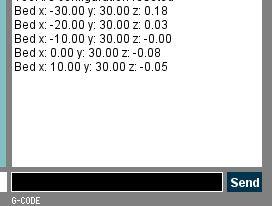
Ahora vamos a aprender cómo ejecutar comandos G-code manualmente. Puedes hacerlo usando la línea de comandos que está abajo a la derecha.
![]()
Es fácil, sólo tienes que escribir el comando G-code y hacer clic en el botón "Send".
Por ejemplo, escribe G28 que es el comando Home (hace lo mismo que si pulsaras en el botón de Home) y a continuación haz clic en Send. El robot iniciará la secuencia de inicio.
Reiniciando la EEPROM
Los parámetros de configuración de TwinTeeth se almacenan en la memoria EEPROM. Esto significa que permanecen en la memoria del Arduino después de apagar la alimentación.
Si has cargado el firmware en el Arduino por primera vez, la EEPROM contendrá la configuración por defecto y no tendrás que reiniciarla. Pero si este no es tu primer calibrado, la EEPROM tendrá la configuración anterior. Si es así, deberás reiniciarla para empezar desde cero.
Hay dos grupos de parámetros en la EEPROM: el grupo de parámetros generales y el grupo de parámetros de los cabezales. El primero de ellos está relacionado con el comportamiento general del robot. El segundo incluye parámetros de configuración específicos para cada cabezal y también incluye los datos de nivelación de la plataforma. TwinTeeth tiene algunos comandos G-code muy útiles para administrar la EEPROM:
- M503 - imprime la configuración actual de parámetros generales (de la memoria, no de la EEPROM)
- M506 - Reinicia los datos de configuración de los cabezales.
- M507 - Imprime los datos de configuración de los cabezales.
Otro comando G-code muy útil es el comando M114 que imprime las coordenadas actuales.
Familiarízate con estos comandos y asegúrate de reiniciar los parámetros de configuración de los cabezales con el comando M506.
Ajustando los microinterruptores de fin de carrera
Los tornillos de ajuste de los microinterruptores de fin de carrera permiten modificar la altura de cada carro en la posición inicial. Esto obviamente afectará a la plataforma y a su nivelación por lo que es importante ajustarlos. TwinTeeth incorpora un sistema de auto-nivelado de la plataforma que luego veremos, pero es importante que antes de usarlo la nivelemos manualmente lo mejor posible ya que el robot funcionará mejor.
Mueve la plataforma hasta la parte superior para tener sitio debajo para ajustar los tornillos. Afloja la tuerca para permitir que el tornillo se mueva en ambas direcciones y ajusta los tres tornillos aprox. a la mitad. Necesitarás un destornillador plano muy pequeño porque no hay mucho sitio y el tornillo es pequeño. Puedes en su lugar usar unos alicates de punta fina con cuidado de no romper el alojamiento del tornillo.
Haz clic en el botón de Home.

Ahora, pulsando en los botones del eje Z, mueve la plataforma hasta que esté aprox. a 5mm de la punta de la sonda.
Teclea G90 en la línea de comandos. Este comando significa que entramos en modo de posicionamiento absoluto. De ahora en adelante todas las coordenadas serán absolutas en relación con el origen de la máquina.
Ahora vamos a posicionar la sonda sobre la plataforma en cuatro puntos específicos. Tres de ellos están en un triángulo centrado en la plataforma, cuyos vértices están en el lado opuesto de cada una de las tres guías lineales o pilares. El cuarto está en el centro de la plataforma.
Llamemos a los tres puntos con las letras de las tres guías lineales: X-Pos, Y-Pos y Z-Pos y el centro C-Pos.
Los comandos G-code para mover la plataforma a cada punto son los siguientes:
X-Pos G0 X33 Y20.20
Y-Pos G0 X-33 Y20.20
Z-Pos G0 X0 Y-38
C-Pos G0 X0 Y0
G0 es un comando de movimiento a una posición absoluta. X, Y van seguidas por las coordenadas correspondientes en el espacio cartesiano 3D.
Atención: No uses todavía el botón "Goto Zero" porque moverás la plataforma a la posición (0,0,0) y puedes golpear la sonda ya que todavía no hemos terminado de calibrar.

Toma un pedazo de cartulina y colócala entre la punta de la sonda y la superficie de la plataforma.

Usando el control del eje Z, mueve arriba la plataforma de 0,1mm en 0,1mm hasta que la cartulina se deslice entre la superficie de la plataforma y la punta de la sonda. Solo tiene que rozar un poco.
Ahora teclea en la línea de comandos el comando correspondiente a la posición X-Pos y haz clic en el botón "Send". La plataforma se moverá a una posición delante del eje lineal X. La altura entre la sonda y la plataforma tiene que ser la justa para que la cartulina se deslice rozando. Si no es así, ajusta el tornillo del carro X. Si lo desatornillas la plataforma baja. Si lo atornillas sube. Luego pulsa el botón Home y repite la prueba varias veces hasta que la cartulina se deslice rozando entre la superficie de la plataforma y la punta de la sonda.
Con el carro X ajustado, haz lo mismo con el carro Y y luego con el Z, moviéndolos a las posiciones Y-Pos y Z-Pos respectivamente.
Una vez hayas terminado de ajustar todos los ejes, deberías ser capaz de repetir con éxito la prueba en los tres puntos sin tener que reajustar los tornillos. En estas últimas pruebas puedes usar el comando C-Pos para ir al centro, comprobar que la cartulina se desliza bien y luego ir a los otros puntos sin hacer Home. Pero si ajustas algún tornillo tendrás que hacer Home.
Una vez hayas verificado que todos los ejes están correctamente ajustados, aprieta las tuercas de los tornillos para evitar que se muevan.
Alineando la Plataforma
Además de estar nivelada, la plataforma tiene que estar perfectamente alineada con el resto del robot. Por esa razón se puede girar a izquierda o derecha sobre su eje encima del efector.
Vamos a alinearla, pero primero tenemos que aprender a mover la plataforma en los ejes X/Y.
En el rectángulo negro de la izquierda de la pantalla tienes los controles para poder hacerlo. A la derecha de él tienes el control del eje Z que ya conoces y arriba el botón de centrado X/Y (Center X/Y). Abajo a la izquierda el de Home. El área del rectángulo en sí misma representa la plataforma.
Puedes hacer click en ella con el ratón y la plataforma se moverá a dicha posición. También puedes hacer click en el cuadrado verde que está en el centro y arrastrarlo donde quieras. Representa la posición actual de la herramienta, en nuestro caso la punta de la sonda. Finalmente también puedes mover la plataforma haciendo click en las flechas de los lados. En este caso la plataforma se moverá los milímetros que se muestran en la esquina superior izquierda del rectángulo. Si pulsas allí verás que puedes cambiar el valor a 0.1,1,10 y 40mm.
Ten en cuenta que parece que los controles están invertidos. Por ejemplo, si haces clic en la flecha de la derecha del rectángulo, la plataforma se moverá a la izquierda. Esto es así porque como el robot está invertido y realmente estás moviendo la punta de la herramienta a la posición de la plataforma que deseas (a la derecha). También que no podrás mover la plataforma cuando esté en la posición de Home porque los carros chocarán con los interruptores de fin de carrera y el robot se parará. Para moverla con libertad la plataforma tiene que estar a una cierta altura de la posición de Home.
El botón "Goto Zero", en la parte superior del rectángulo, mueve la plataforma a la ubicación (0,0,0). Esta es la posición de inicio donde el robot comienza a imprimir o a trabajar y puede ser diferente para cada cabezal, como hemos dicho antes.
Atención: no lo utilices antes de calibrar la posición cero del cabezal porque puedes darle a la herramienta con la plataforma.
Por último, en la parte inferior del rectángulo, a tu derecha, puedes ver las coordenadas X,Y.
Para alinear la plataforma sigue los siguientes pasos:
Afloja los tornillos que sujetan la plataforma al Effector (si están apretados)

Haz click en el botón de Home.
Mueve la plataforma hacia arriba hasta que esté a 1mm de la punta de la sonda, en el centro de la plataforma.

Selecciona 10mm en el control de distancia de movimiento (esquina superior izquierda del rectángulo) y con las flechas del eje Y, mueve la plataforma a lo largo de las marcas que hiciste en dicho eje. Si en los extremos la punta no coincide con las marcas, gira ligeramente la plataforma en el tubo hasta que lo haga.

Repite la operación varias veces y una vez que la plataforma esté alineada en el eje Y, haz clic en el botón de centrar X/Y y repite lo mismo para el eje X, también de lado a lado. De nuevo, gira la plataforma para alinearla si fuese necesario. Finalmente, verifica de nuevo que se alinean bien ambos ejes X/Y y la plataforma apoya firmemente en el efector en toda su superficie. Luego aprieta ligeramente los tornillos del Effector que sujetan la plataforma.
Nivelando la plataforma
El firmware de TwinTeeth incluye un algoritmo de auto nivelación que mantiene la plataforma perfectamente nivelada mientras que el robot está en movimiento. Este algoritmo utiliza los datos obtenidos con la sonda al ejecutar el comando de calibración de la nivelación. Durante esta calibración, se mide la distancia de la sonda a la superficie de la plataforma en una matriz de puntos X/Y y se almacenan los datos obtenidos en la EEPROM para su uso futuro.
Para ejecutar la calibración, primero haz clic en el botón "Calibrate" que está encima de la imagen que representa la herramienta actual. Este botón te permite mostrar u ocultar los controles de calibración. Si haces clic en él aparecerá lo siguiente:

A tu izquierda, el control deslizante Z min que permite definir la posición mínima del eje Z más allá de su límite, que es el cero. Necesitarás usarlo por ejemplo al taladrar PCBs, ya que la broca deberá ir más allá del cero, que es la superficie de la placa. De lo contrario el robot se pararía en la superficie (el cero). Esta configuración es particular a cada cabezal así que puedes tener posiciones Z min diferentes para cada uno de ellos.
El botón Set Program Zero te permite ajustar la posición de cero del cabezal actual o trabajo a realizar, así que es particular para cada cabezal. Lo utilizarás para ajustar el origen del sistema de coordenadas (0,0,0) ya puede haber pequeñas diferencias entre los cabezales. El origen está en el centro de la PCB y en su superficie. Si el trabajo a realizar requiere otro tipo de material entonces la posición cero estará en la superficie del material, o en la superficie del vidrio sobre el que se imprime en 3D.
El botón Bed Auto-levelling, o botón de auto-nivelación de la plataforma, ejecuta la secuencia de calibración del sistema de nivelación. Si pinchas en él podrás ver, cómo la plataforma primero se va a la posición Home, y luego sube a encontrar la sonda. Una vez toque en ella, el robot comenzará a mover la plataforma hacia arriba y hacia abajo en diferentes coordenadas, midiendo la altura de la punta de la sonda a la plataforma. Finalmente almacenará toda esta información en la memoria EEPROM.
El botón Reset Tool, o botón de reinicio de la herramienta, borra de la EEPROM los datos de calibración de la herramienta actual. Es útil si quieres empezar desde cero con una herramienta determinada y calibrarla de nuevo.
Ahora vamos a usar el botón de nivelación de la plataforma. Comprueba primero que la pinza de cocodrilo está sujeta al cable de la sonda y pulsa en el botón Bed Auto-levelling. El robot comenzará a moverse.
Mientras el robot va tomando puntos, la ventana de la derecha mostrará las coordenadas y la altura obtenida.
Cuando finaliza muestra la matriz de nivelación completa con todos los datos. Entonces puedes hacer clic en el botón Calibrate de nuevo para ocultar los controles de calibración.
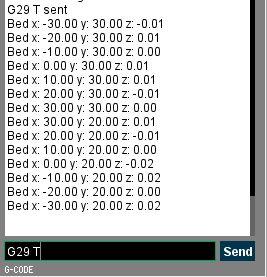
Puedes comprobar el sistema de autonivelación utilizando el comando G29 T. Este comando repite la secuencia de sondeo, pero esta vez mientras el robot nivela la plataforma, así que podrás ver la diferencia entre el antes y el después.
Comprobando las dimensiones
En este punto el robot probablemente se mueve bien e incluso podría imprimir ya, pero tenemos que asegurarnos de que lo hace de una forma dimensionalmente correcta. Puedes hacerlo de diferentes maneras: usando la punta de la sonda, dibujando con el rotulador en un pedazo de papel, imprimiendo un objeto 3D, etc. Básicamente debes verificar que si pides al robot que se mueva, por ejemplo 80mm realmente se mueve 80mm. En caso contrario tendrás que ajustar algunos parámetros en el firmware. En teoría no necesitarás hacerlo si el robot fue ensamblado correctamente, pero por si acaso debes comprobarlo y ajustar los parámetros si fuese necesario.
Calibrar la dimensión Z con precisión sólo es necesario si quieres imprimir en 3D. Para hacerlo tiene que imprimir un objeto 3D. Suele ser un cubo de 20x20x20mm. Tienes que imprimirlo y con un calibre comprobar la exactitud del objeto impreso y compararlo con el original. Luego ajustar el firmware.
Si la longitud de la medida (o dimensión del objeto 3D) es superior o inferior en 0,1mm a la del original, entonces tendrás que ajustar dos parámetros del firmware:
- Steps per mm - pasos por milímetro, que controla el movimiento de los motores y de los ejes X,Y,Z
- DELTA_DIAGONAL_ROD - distancia entre el centro de los agujeros de las varillas delta, que controla la precisión dimensional.
Ajustalos en ese orden.
Para ello abre el IDE de Arduino y el archivo TwinTeethFirmware.pde. Haz clic en la pestaña Configuration.h para editar el archivo.
Comprueba primero los pasos por mm. El parámetro que tendrás que ajustar (si fuese necesario) es XYZ_TRANSMISSION_PITCH, que define el paso de los husillos. El Kit del Bastidor de nuestra tienda incluye husillos de 3mm de paso. Usando estos husillos, el valor ya ajustado para este parámetro es de 3.04mm. Si utilizas otro tipo de husillos tendrás que ajustarlo.
Luego ajusta el parámetro DELTA_DIAGONAL_ROD. Representa la longitud de las varillas delta. Deben tener una longitud de 170mm de agujero a agujero. El valor predeterminado en el firmware es de 167,5mm, pero cambialo si es necesario.
Para calcular el nuevo valor mueve la plataforma una cantidad determinada de mm y mide con un calibre lo que realmente se movió.
Luego utiliza la siguiente fórmula:
DELTA_DIAGONAL_ROD = 100/longitud medida * valor original de DELTA_DIAGONAL_ROD.
Finalmente, guarda los cambios, compila y vuelve a cargar el firmware en el Arduino. Luego imprime o mide de nuevo. Una vez que las dimensiones sean aceptables el robot imprimirá con precisión y estará completamente calibrado.
Hay otro parámetro importante en la configuración del firmware llamado DELTA_RADIUS. Controla la nivelación de la plataforma y sólo tendrás que ajustarlo en caso de haber encontrado dificultades al ajustar los interruptores de fin de carrera.
Configurando el Inicio de Programa
Como dijimos anteriormente, la posición (0,0,0) del sistema de coordenadas se encuentra en el centro de la plataforma y en la superficie de la PCB o material que se desees procesar. Este origen puede ser diferente para cada cabezal, e incluso para cada trabajo (programa). Por ejemplo, si utilizas diferentes brocas con el taladro es probable que tengan diferentes longitudes y tendrás que configurar un "inicio del programa" diferente para cada una de ellas. Otros cabezales no cambian su longitud con tanta frecuencia, o nunca lo hacen, como por ejemplo el cabezal láser, pero en cualquier caso tendrás que apuntar el laser de forma precisa al centro de la PCB antes de empezar a imprimir.
El botón Set Program Zero, o "inicio de programa", te ayudará a calibrar estas cosas. Sólo tienes que mover la plataforma a la posición que desees determinar como el origen del trabajo (o del cabezal) y hacer clic en él. A partir de ese momento esa será la posición de inicio (0,0,0) para el cabezal actual. Y todos los movimientos de la plataforma se realizarán en relación a dicha posición. Si deseas borrar la configuración y volver al valor por defecto, simplemente haz clic en el botón Reset Tool (reiniciar herramienta).
Mediante el comando G-code M507 puedes obtener, por cada cabezal, el desplazamiento de cada eje con respecto a su origen real. También te proporcionará información sobre cual es el cabezal actual y el estado de la calibración del sistema de auto nivelado.
Ahora vamos a configurar el Inicio de Programa para el cabezal del rotulador.
Selecciona la herramienta Pentool haciendo clic en la pestaña superior izquierda de la ventana (si no está ya seleccionada). Haz clic en el botón "Calibrate" y reinicia la configuración de la herramienta haciendo click en el botón Reset Tool. Fijá también la posición mínima del eje Z moviendo el deslizador a por ejemplo -0.3mm.
Ahora pulsa en el botón de Home.
Retira la pinza de cocodrilo de la sonda y luego retira la sonda del hexágono. Inserta en su lugar el rotulador. Tiene que sobresalir por debajo aprox. 40mm. Comprueba que el rotulador esté perfectamente vertical.
Mueve la plataforma hasta que la punta del rotulador esté a punto de tocar la superficie de la plataforma. Comprueba que apunta de forma precisa al centro de la cruz que hiciste en la plataforma. Si no es así mueve con los controles el X o el eje Y hasta que lo haga. Luego mueve el eje Z las últimas décimas de milímetros hasta que la punta del rotulador toque la superficie de la plataforma. Esa posición será el (0,0,0). Finalmente haz clic en el botón Set Program Zero para establecer dicha posición como el origen de coordenadas.
Haz click de nuevo en Home y luego en el botón "Calibrate" para ocultar los controles de calibración.
Ahora que has configurado el origen de la herramienta puedes utilizar con seguridad el botón "Goto Zero" y mover la plataforma a esa posición. Haz clic en él y verás cómo la plataforma sube y se detiene con precisión en la punta del rotulador.
Veremos con más detalle cómo configurar el "Inicio de programa" de cada cabezal cuando los describamos en próximos capítulos.
Diyouware Web Link
Por último, si haces clic en el logo de Diyouware, en la esquina superior derecha de la ventana, accederás a este servidor web.
Te será útil en caso de que necesites consultar este tutorial mientras calibras el robot.
En próximos capítulos veremos cómo ensamblar y calibrar los diferentes cabezales soportados por el robot.
Capítulo anterior Indice Home Siguiente capítulo