
TwinTeeth - Assembling the Framework
Once all the materials have been prepared you can begin the assembly of the framework.
Assembling the Bottom Triangle
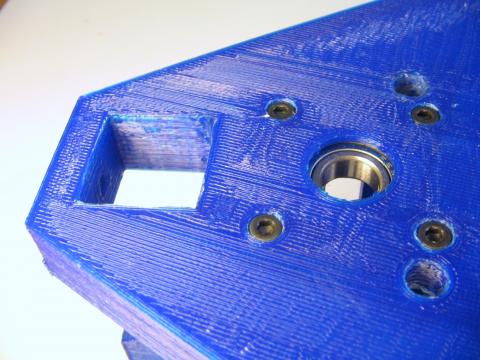
Insert the F6900ZZ ball bearing in its housing in the vertex.

Insert also two M3x12mm bolts in the 6mm steel axes retainers and screw them a little through the nuts.


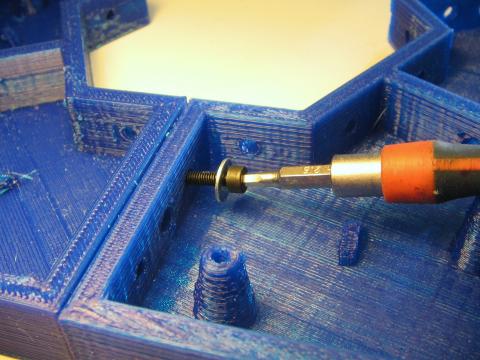
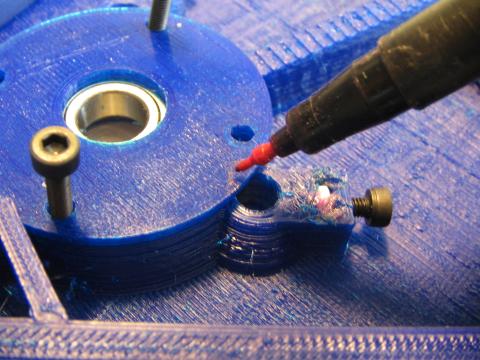
Optional: Insert a M4 nut in its trap using the soldering iron (see picture below). This nut is optional because we screw these bolts directly in the alu. tube. In this way, the bolts are attached to both tube walls which is more robust, but if you prefer the traditional method of nut&bolt then you will need to use this nut and longer bolts (M4x35)

Insert two 6mm steel axes in the retainers holes (see next picture) to check that they fit well.
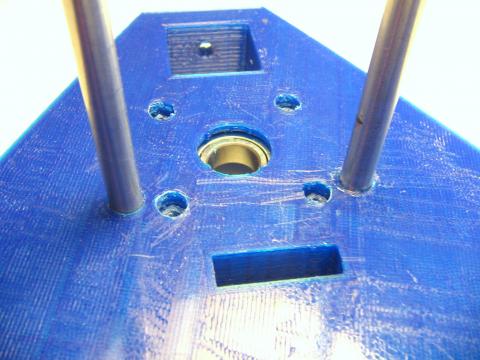
Tighten the retainer bolts (see next picture) and check that they really retain the axes.

Loose the retainer bolts and remove the axes. We will install them later.
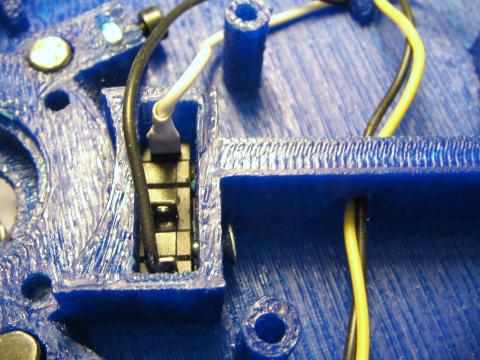
Using two tiny M2 metal-sheet screws, install the endstop micro-switch in its housing. You can do this task later but it is easier to do it now.
The micro-switch has to be levelled with the top surface of the vertex and the tiny micro-switch actuator standing out of it. Note that the micro-switch can be inserted in both positions. The correct one is where the actuator remains centred between the 6mm axis (see picture below with the axes and Acme screw already installed)
Repeat the last steps with the rest of the bottom vertexes.
Now we are going to assemble the bottom triangle.
Take the three bottom vertexes and put them together on a flat table with the top side down.
Put the Bottom Hexagon in the centre of the triangle.
Check that the complete set fits well. Use a file or sand paper and go over the sides till all the puzzle pieces fit well together.

Now join the pieces with bolts.
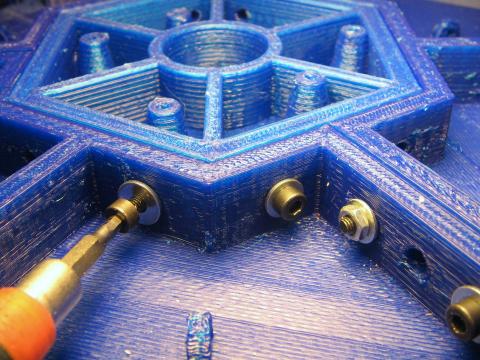
Insert six (two per vertex) M3x16mm bolts in the walls of the vertexes (see picture below)
Use a M3 washer in one side of the bolt and a M3 washer and a M3 nut on the other side. Don’t tighten the bolts yet, just screw the nuts in with your fingers.

Insert the second vertex bolt in the other way.
You can see in the picture above that there is another hole in the wall, just in the middle of both bolts. It is a wiring pass-through hole. All the vertex joints have one of these holes, very useful to wiring the electronics.
In a similar way join the Bottom Hexagon piece to the vertexes with twelve M3x16mm bolts.
Now tighten a little all the bolts in a circular sequence. Repeat the sequence some times till all the pieces fit well with each other and all the bolts are fully tightened.
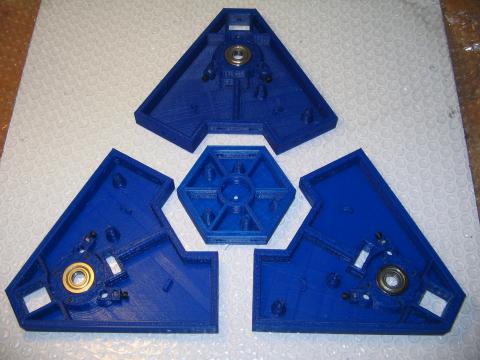
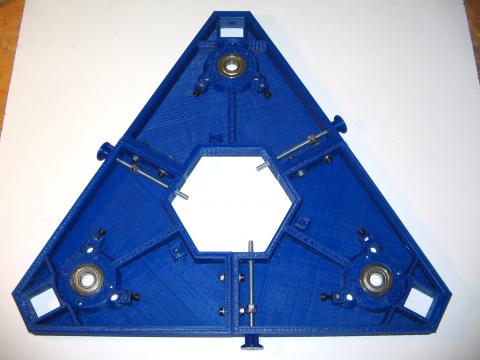
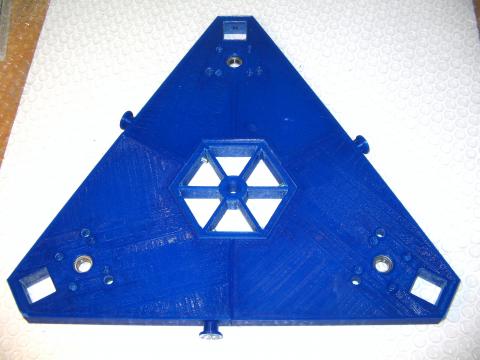
You have assembled the bottom triangle. It will look like the one in the following pictures.
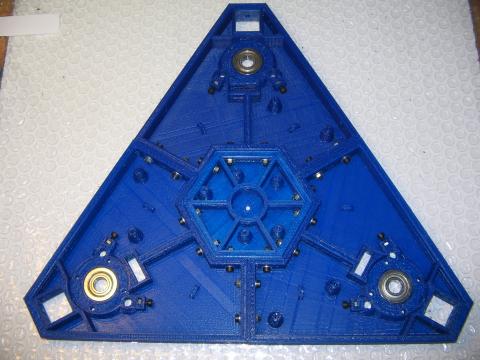
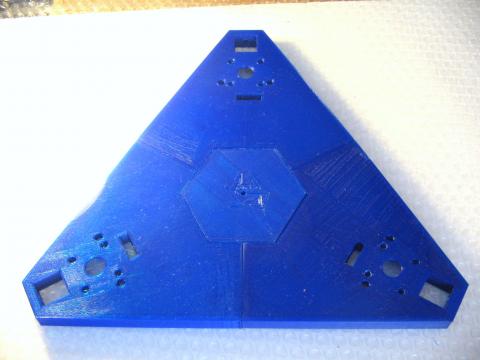
It has to be flat on the table without bending and with minimal gaps between the pieces (3D printing process is not always accurate so some small gaps are allowed).
Assembling the Top Triangle
Now we are going to assemble the top triangle.
Take the three top vertexes and put them together on a flat table with the top side down. Put the Marker Pen Hexagon in the center of the triangles.

Check that all the pieces fit together.
Using a cutter and/or a file go over the side of the pieces and remove blobs, plastic threads, etc. It Is specially important to do it on the hexagonal hole of the triangle and on the perimeter of the hexagon because the hexagon has to fit and slide through the triangle hole when installing the ToolHead.
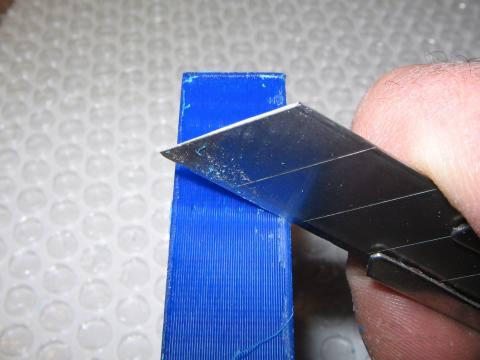
Now you have to remove the "Elephan't foot" from the plastic pieces. We call Elephan't foot to the first couple of layers which are wider than the rest.
Using the cutter remove it from the Marker Pen Hexagon and from the hexagonal hole formed by the vertexes. The Elephan't foot could brush against the walls when inserting the ToolHead, so it's important to remove it from all the ToolHead hexagons and from the vertexes.

Check again that all the set fit well together.

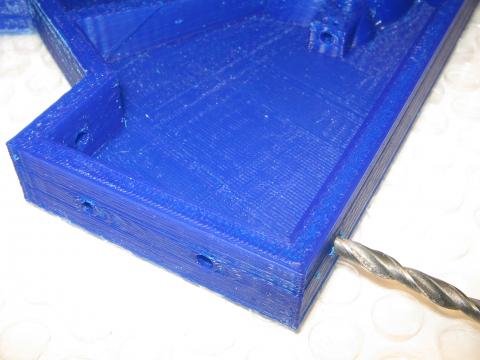
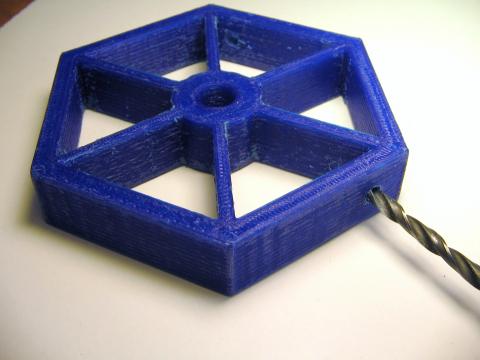
Using a 3,4 and 6mm drill bits go into the M3 bolt holes, ToolHead retainer holes, and axes holes as we did in the bottom triangle.

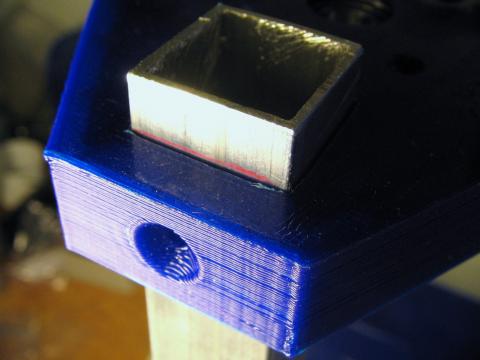
If you didn't do it before, insert also the optional M4 nut in its trap (see picture below).

Using the soldering iron insert a M3 nut in the camera anchoring. Take care and don't melt the bottom surface. There the vertex wall is very thin and you could go through it.

Insert the two M3x12mm bolts into the 6mm steel axes retainers and screw them a little through the nuts.

Warning: using the new 200mm acme lead-screw improvement you have to install the ball bearings in the new lead-screw support parts instead of the top triangles.
Insert the F6900ZZ ball bearing in its housing.

Check that the Ball Bearing Cover fits well in it. Use a cutter or the soldering iron to clear a small circular piece of it, just where the 6mm axis holes match the cover (otherwise the 6mm rods will not enter into the holes when we install them later on)

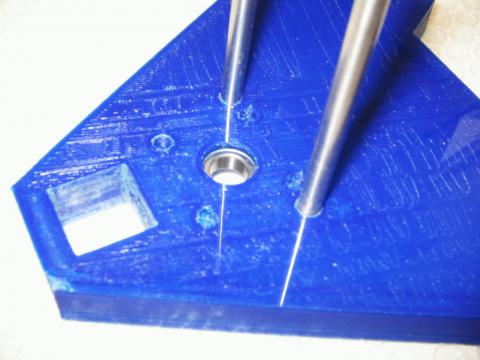
Insert two 6mm steel axes in the retainers' holes (see next picture) to check that they fit well.
Tighten the retainers' bolts and check that they really retain the axes.

Loose the retainers' bolts and remove the axes. We will install them later.
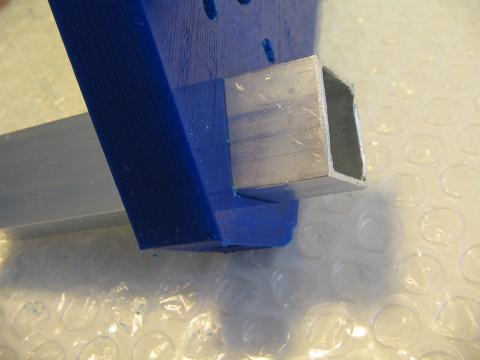
Using a file or a cutter go into the alu. square housing and check that the tube fits and slides well in it.
Repeat the last steps with the other top vertexes.
Bolt the vertexes together with M3x16mm bolts in a similar way we did with the bottom triangles. Tighten the nuts in just a little with your fingers.

Put the triangle on the table upside down.

Try to slide the hexagon piece into the hexagon hole. It has to slide more or less smoothly. Note that the hexagon external wall has three 4mm holes in certain positions. These holes are for inserting the ToolHead retainers. They have to match with the holes on the vertex walls. When inserting the hexagon into the hole, check that it is in the right position and the retainers' holes match with the vertex ones.
The hexagonal pieces and the hexagonal hole were designed with some gap in mind, but 3D printing process is not always accurate. How well they fit depends on how well the 3D printer was calibrated.
If the gap between the hexagon and the hexagonal hole is too big and it slides without any friction, then tighten again the bolts of the triangle in a circular sequence and try again. If it continues too loose-fitting, then you will need to disassemble the triangle and go over the lateral walls of the vertexes with a file and fit them together reducing the gap.
If you cannot insert the hexagon easily or it gets stuck in the hexagonal hole, then you will need to increase the gap.
First try to go over the hexagone external walls and check again that the surface is plain, there is no "Elephan't food", check also the corners, sand it, etc. If the walls are plain and you've already sanded it well, then no way: you will need to increase the gap between the triangles. You can use a piece of paper, cardboard or plastic sheet between the vertexes to increase a little bit the hexagonal hole.
Installing the ToolHead Retainers
The ToolHead retainers are three M4x80mm threaded rods which are used to retain the ToolHead in its position. It slides through some holes made in the vertexes and the ToolHead Hexagonal pieces.
First pinpoint the materials: three M4x80 threaded rods, three knobs and nine M4 nuts.

Using a file round both ends of the M4 threaded rods.

Using the soldering iron insert a M4 nut in the Retainer Knob housing.

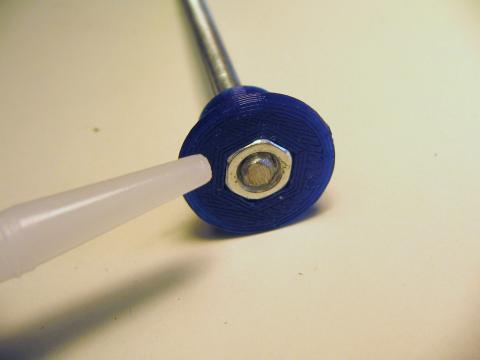
Screw a M4x80mm threaded rod into the retainer knob and the M4 nut.

Then put a drop of cyanocrylate in the nut and glue it to the knob and threaded rod.
Repeat the last steps with the other retainers.

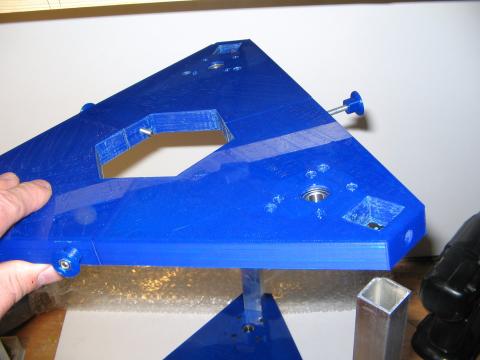
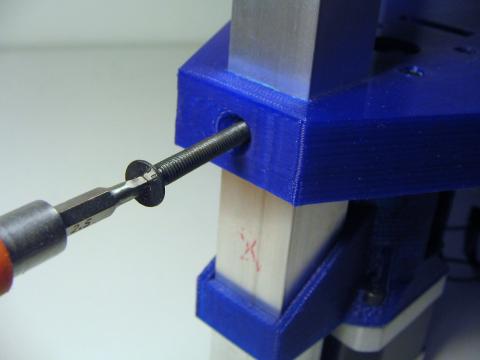
Now we are going to install them in the vertexes. Insert the retainer bolts in the vertex's lateral holes.

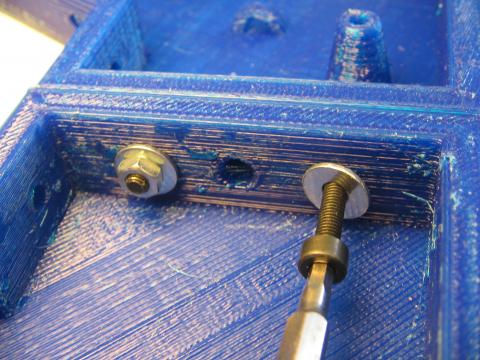
Screw two M4 nuts in the threaded rod (see following picture). These nuts set the retainer sliding limit.

Check that the threaded rod is levelled with the hexagonal wall when the retainer is open. Then tighten the nuts using two pliers.

Screw also the nuts in the other ToolHead retainers.
Insert the Marker Pen Hexagon in the correct position and slide the retainers into their holes. Check that the threaded rod slides smoothly into it. Slide the retainers in and out several times and check that they work well and don't get stuck. Check also that you can insert and remove the hexagon from the triangle.
The top triangle is ready.
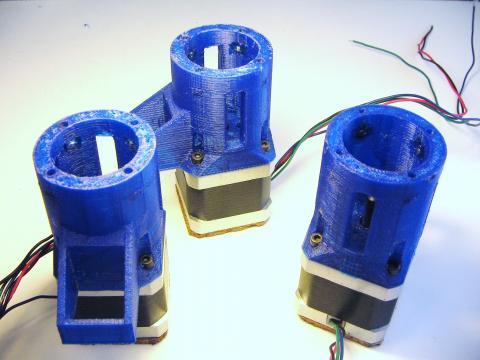
Installing the Nema 17 Motors
Now we are going to prepare and install the Nema 17 motors.
You will need three stepper motors 42BYGHW609 or similar. Any bipolar motor of 40mm of length and a holding torque between 3.400-4.000 g/cm will do the job. Just take care about max. current consumption because the limit of the drivers is 2A per coil.
Glue the motor foot using contact adhesive. It is a piece of cork sheet of 42x42x4mm.

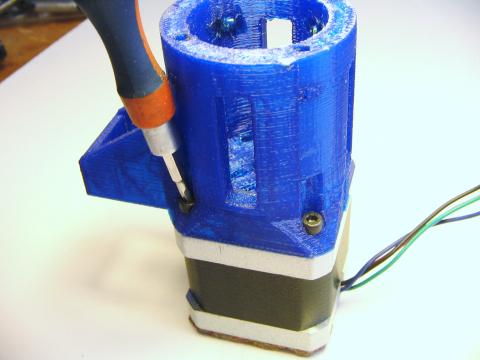
Then tighten the motor to the Motor Holder with four M3x8mm screws. IMPORTANT: the motor wires must point out to the other way of the alu. tube housing (see next picture).
Now you are going to install the 5x10 Motor Coupler. Its mission is to connect the motor shaft (5mm D) with the Acme Screw (10mm D).

Using an M2 Allen key, loose a little the two grub screws which are near to the 5mm-hole side of the coupler.
Put the coupler into the Motor Holder and insert the motor shaft into the 5mm hole of the coupler.
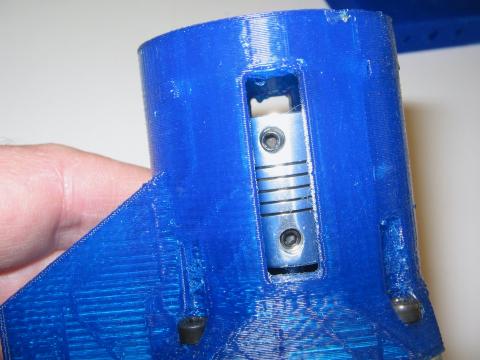
Move the coupler a little up using a screwdriver through the Motor Holder window. The coupler has to stay approx. 5mm from the Motor Holder's bottom surface. Then tighten the bottom grub screws with the Allen key. Tighten them little by little in sequence (in order to centre the coupler with the motor shaft).
Repeat all these steps with the other motors.
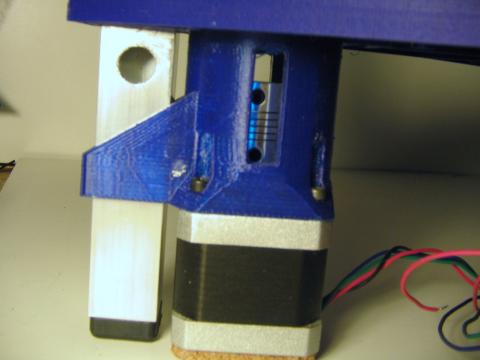
Now we are going to install the motor and its holder on the bottom triangle.
First put the ball bearing cover in its position (with the slot pointing to the M4 nut housing).


Then put the Motor Holder with the attached motor and coupler on the Ball Bearing cover. Check that the alu. tube housing of the Motor Holder is aligned with the Vertex alu. tube housing.
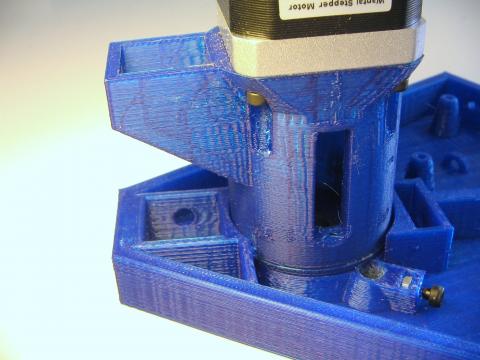
Slightly introduce an alu. tube through the Vertex and Motor Holder housings, moving at the same time the motor set to align it.
Attach the motor set to the vertex with four M3x20mm bolts.
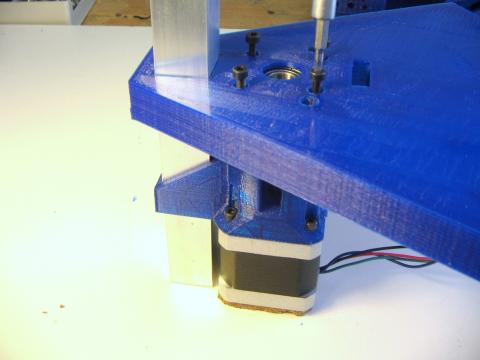
Tighten the bolts and remove the alu. tube. It was just used to align the Motor Holder and the Vertex housings and we will install it later.
Repeat these steps with the other motor sets.
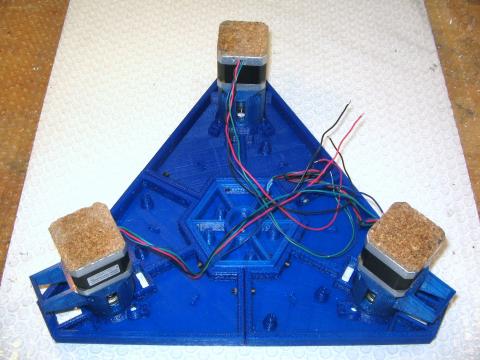
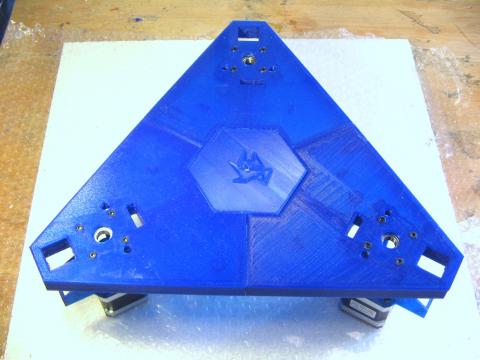
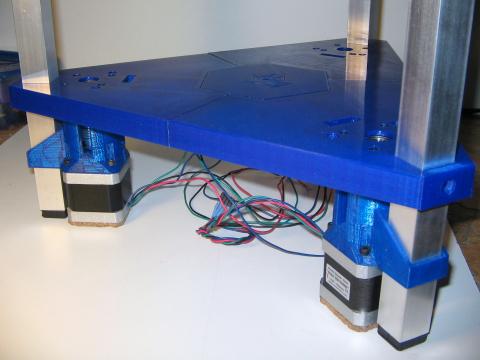
After that, the Bottom Triangle will look like this in the following pictures:
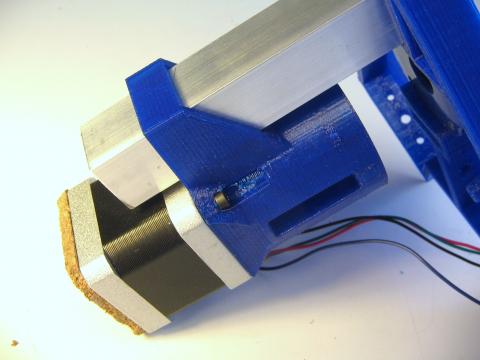
Attaching the Pillars
Now we are going to insert the alu. tubes (pillars) in their housings.
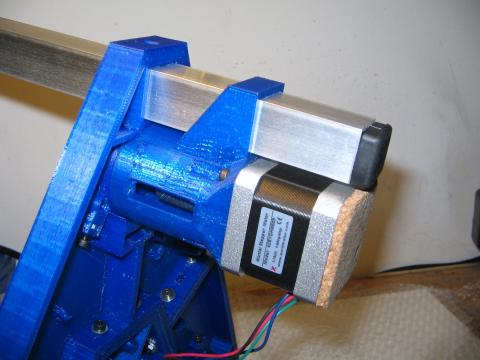
Take one 20x20mm alu. tube and using a hammer insert a square plastic plug into one end of the tube.

Carefully insert the tube (from the motor side to the vertex side) into one motor holder.
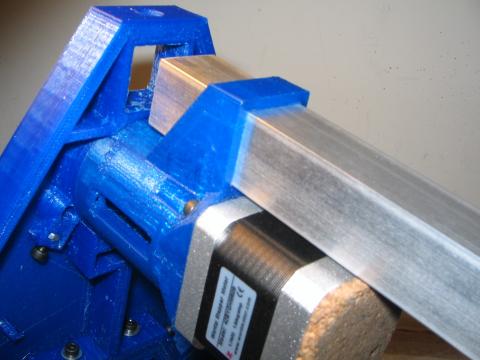
Slide the tube till the plug is levelled with the piece of cork glued to the motor.
Repeat this operation with the other tubes.
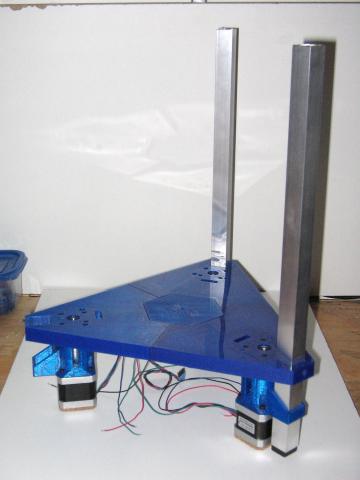

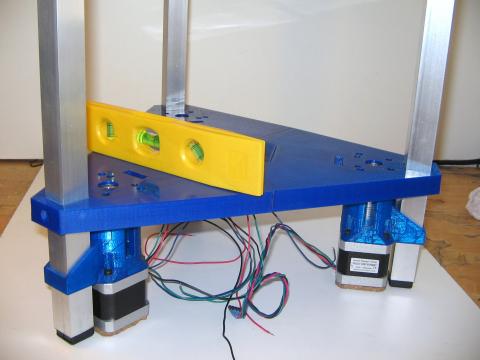
Check that the three plastic plugs and the motors are standing on the table and also that the triangle is levelled .
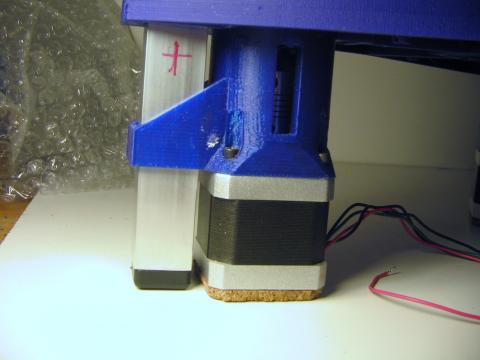
Mark with a Marker pen the drilling position of the three M4x30 bolts which attach the tubes to the bottom triangle.
Now we are going to install provisionally the top triangle.
First use a ruler for measuring along the tube 295mm from the bottom triangle surface. Mark a line with a marker pen and repeat with the other tubes.

Put the top triangle on the framework and slide it through the three alu. tubes till the top side matches the marks you draw.

Check again near each pillar that the distance from the bottom triangle's top side to the top triangle's top side is exactly 295mm. Slide the triangle up or down to adjust the distance if needed.

Using the marker pen, mark the M4x30 bolt position through the hole of the plastic part.
Repeat the last two steps on the other alu. tubes.
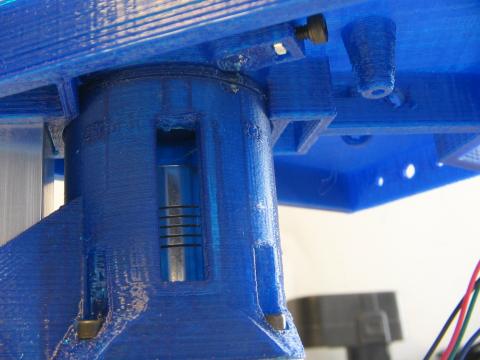
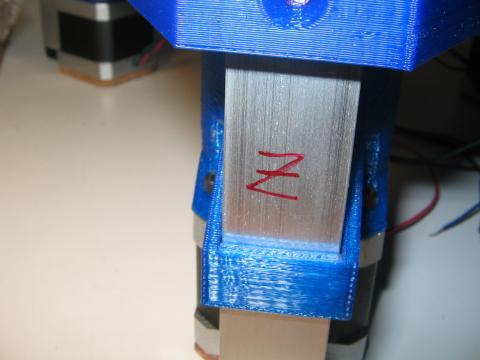
Now you have to mark the alu. tubes with a letter which identifies the belonging axis.
This is because we are going to remove them from the framework and when we will install them later we have to do it in the right position. The robot has three axes (X,Y,Z) If you look ahead at the framework and you see at the bottom hexagon the Diyouware logo (it's a cat) standing on its feet, then, on your left you have the X axis and on your right the Y axis. The other axis is the Z axis which is at the backside.
Write the corresponding letter of each axis on each alu. tube.
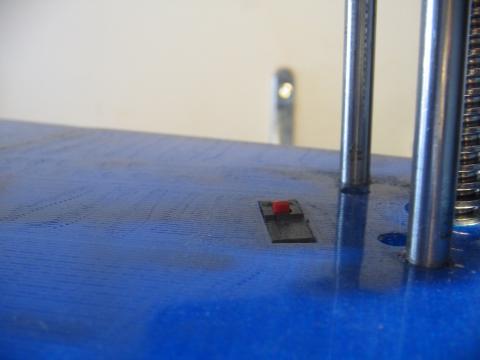
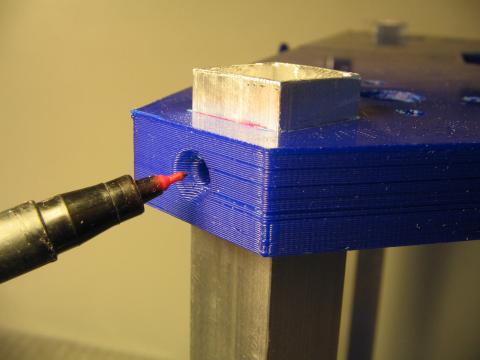
Paint also a mark between the bottom triangle and the motor holder of the Z tube (see next picture). Later you will drill there a 10mm hole to pass through the wiring which connects the Arduino with the DB15 connector installed on the top side of the robot.
Now we are going to drill the holes.
First, slide out the top triangle and remove it from the framework. Then slide down the tubes from the bottom triangle.

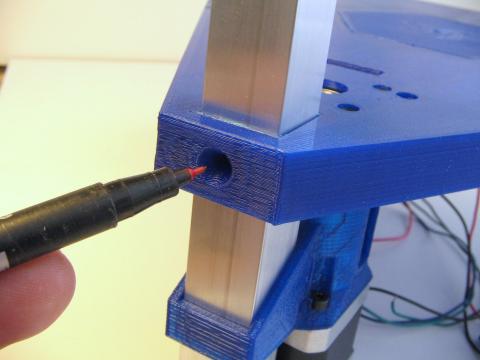
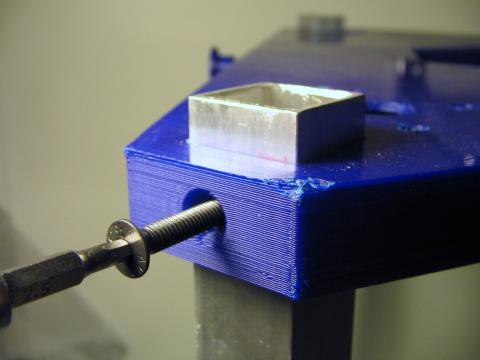
Using a centre punch mark the position of the drilling.

Drill the bolt holes passing through both tube walls using a 3.5mm drill bit. The bolt is really 4mm of diameter but we will screw it directly on the alu. tube making the thread while we screw it. This is possible because the aluminium is soft. You can make the threads now. It will be easier now than later. Use a drop of oil and screw the bolt in the 3.5mm hole turn by turn, going forward and backwards.

Use a 10mm drill bit to drill the pass-through hole of the wiring.
Tip: Insert now the wires through the pass-through hole till the top end of the Z tube. It will be easier to do it now than later. You will need to install 15 wires, CAT5 or similar flexible wires for computer networks. Max. current will be 1A per wire for the four motor cables. Install also a one-way thin shielded cable for the FE signal. We used an earphone cable for this. A length of 700mm will be enough for all the wires. Later you can adjust its length.
Insert again the alu. tubes on the bottom triangle. Check that the axis letter you wrote matches the correct axis.
Check that the triangle is levelled and the three motor and plastic plugs are standing on the table. Then fasten the bottom triangle to the tubes using three M4x30 bolts. Screw it slowly, forward and backward, making the thread into the alu. tube (if you didn't do it before) A drop of oil will help to make the thread. Then tighten it.
Tip: use a small piece of plastic sheet or cardboard to fill any gap between the alu. tube and the motor holder. Remove any gap between the plastic parts and the alu. tubes. It will provide more robustness to the framework.

Insert the top triangle and fasten it with three M4x30 bolts in the same way you did with the bottom one.
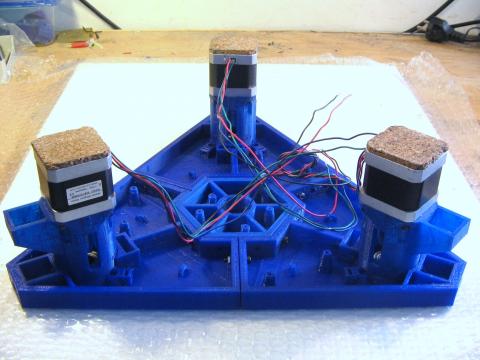
You finished the job. The framework will look like the one in the following picture:

At the end of this chapter you will have the framework assembled and ready to install the motion system on it.
Previous chapter Assembly index Home Next chapter