
TwinTeeth - Ensamblar el Bastidor
Una vez hayas preparado los materiales es el momento de ensamblar el bastidor.
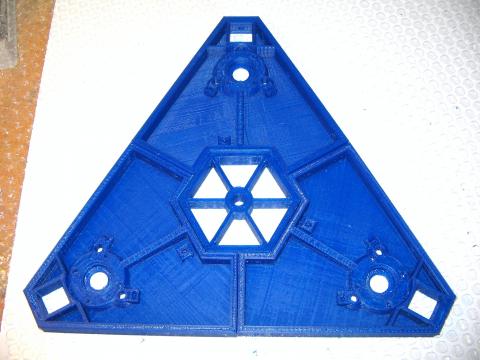
Ensamblando el Triángulo Inferior
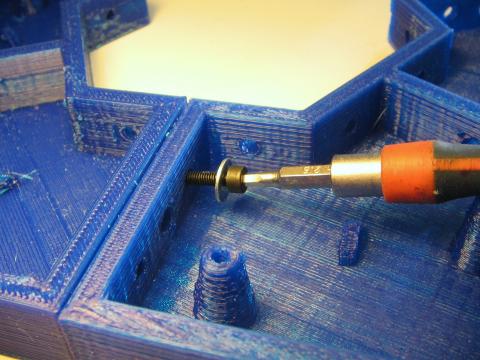
Presionando con los dedos inserta el rodamiento F6900ZZ en el alojamiento del vértice

Inserta dos tornillos M3x12mm en los retenedores de los ejes de acero de 6mm y atorníllalos un poco en las tuercas.


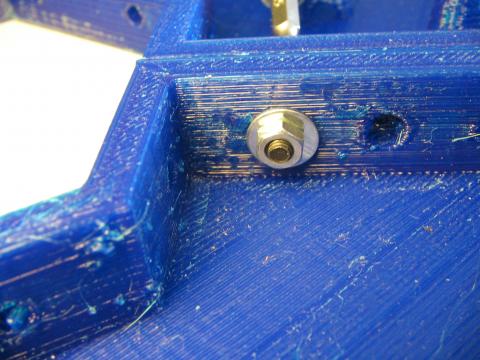
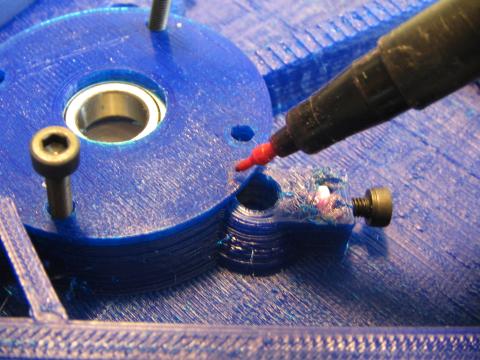
Opcional: inserta con el soldador una tuerca M4 en su alojamiento (ver siguiente foto). Esta tuerca es opcional porque los tornillos van roscados directamente en ambas paredes del tubo de aluminio. De esta forma el bastidor queda más robusto. Pero si prefieres el método tradicional de tornillo y tuerca tendrás que instalarla y usar tornillos un poco más largos (M4X35).

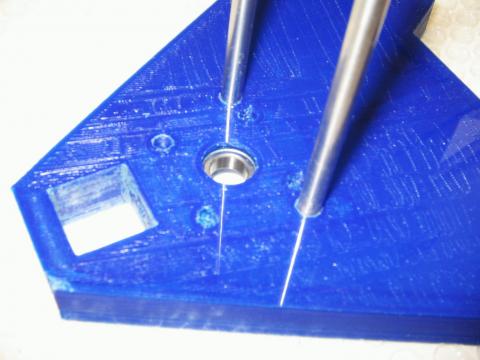
Inserta dos ejes de acero de 6mm en los agujeros de los retenedores (ver siguiente foto) y comprueba que encajen bien.
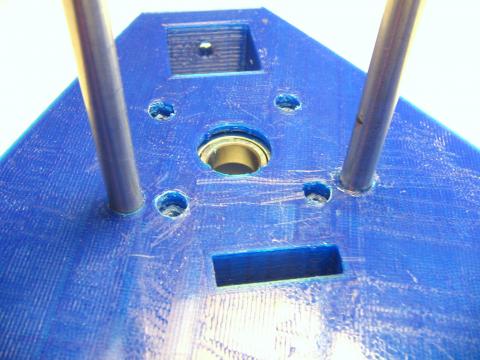
Aprieta los tornillos de los retenedores (ver siguiente foto) y comprueba que realmente retienen los ejes de acero.

Afloja los tornillos y quita los ejes de acero. Los instalaremos más tarde.
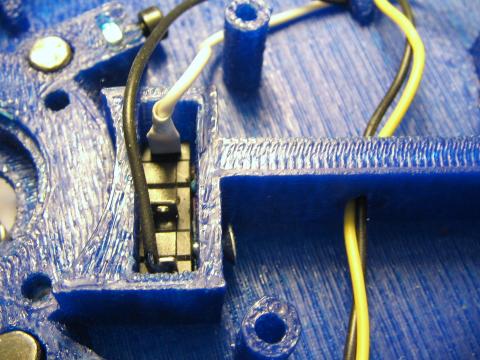
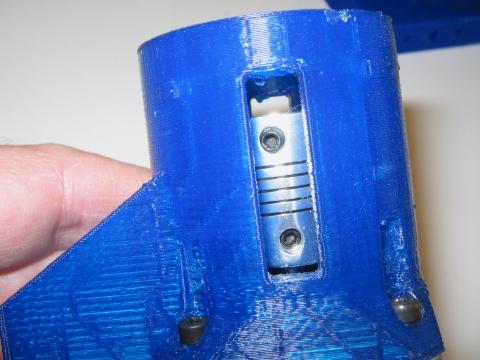
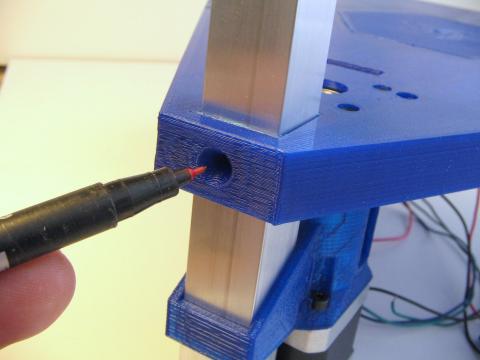
Usando dos pequeños tornillos M2 o M2.5 de rosca chapa, instala el microinterruptor de fin de carrera en su alojamiento. Puedes hacer esto más tarde pero ahora es más sencillo hacerlo.
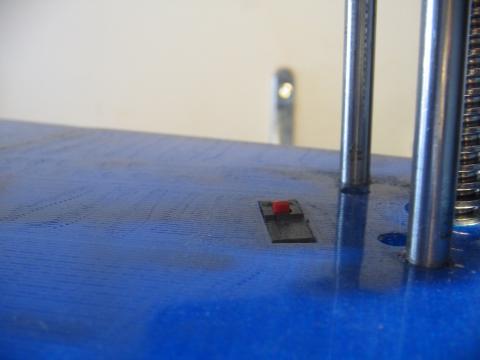
El microinterruptor tiene que estar a ras de la superficie superior del vértice, con el pequeño actuador (normalmente de color rojo) sobresaliendo ligeramente de ella. Ten en cuenta que el microinterruptor se puede instalar en dos posiciones. La correcta es cuando el actuador está perfectamente centrado entre los dos ejes de acero (ver siguiente foto).
Repite estos pasos con el resto de los vértices del triángulo inferior.
Ahora vamos a ensamblarlo.
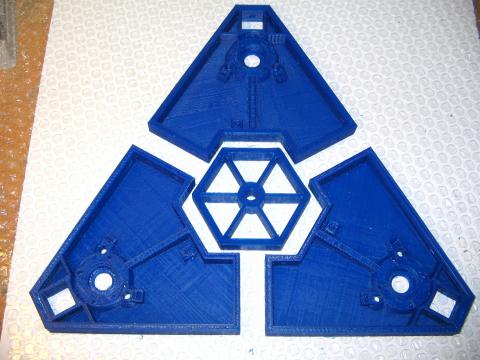
Toma los tres vértices y juntalos sobre una superficie plana, con la cara hacia abajo.
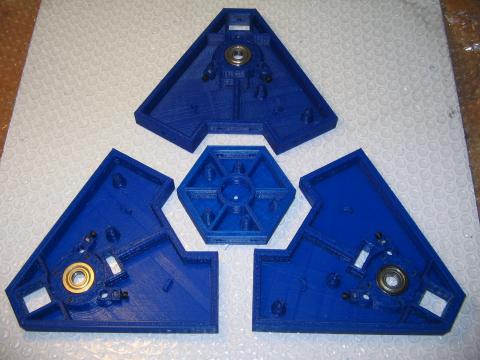
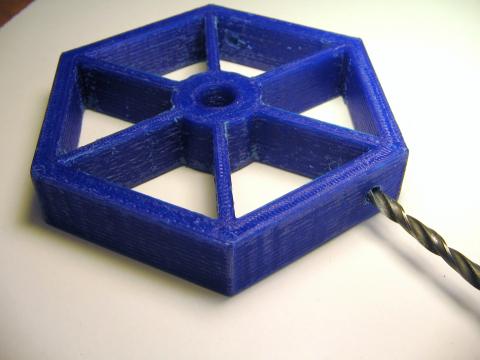
Pon el Hexágono Inferior en el centro del triángulo.
Comprueba que el conjunto completo encaja bien. Usa una lima, cuchilla o lija para repasar bien las caras hasta que el "puzzle" encaje bien.

Ahora vamos a atornillar el triángulo.
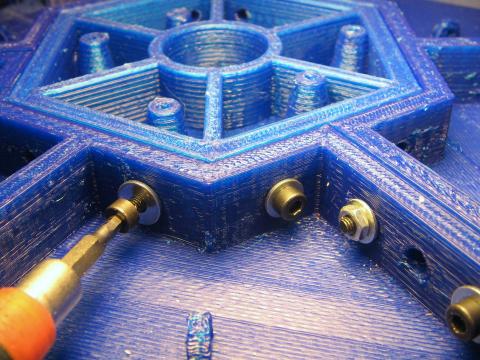
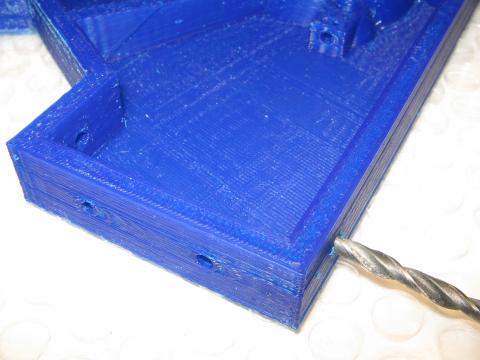
Inserta seis tornillos M3x16mm (dos por vértice) en las paredes que sirven de unión entre ellos (ver siguiente foto)
Usa una arandela M3 en un lado del tornillo y una arandela y tuerca M3 en el otro lado. No los aprietes todavía, sólo enrosca las tuercas con los dedos.
Pon el otro tornillo en el sentido contrario según la siguiente foto.
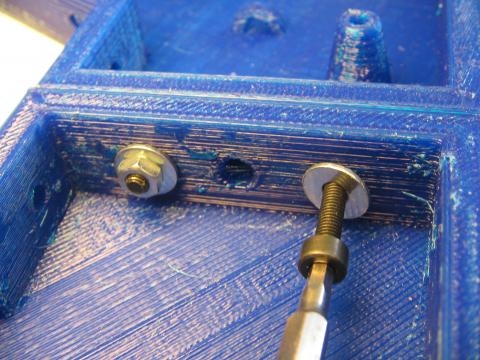
Puedes ver en la foto anterior que hay otro agujero en el muro que separa ambos vértices, justo entre los dos tornillos. En un agujero pasa-cables que será muy útil cuando cableemos la electrónica.
De forma similar, atornilla el Hexágono Inferior a los Vértices con doce tornillos M3x16mm.
Ahora aprieta poco a poco todos los tornillos siguiendo una secuencia circular. Repite la secuencia varias veces hasta que todas las piezas encajen bien entre ellas y todos los tornillos estén apretados.
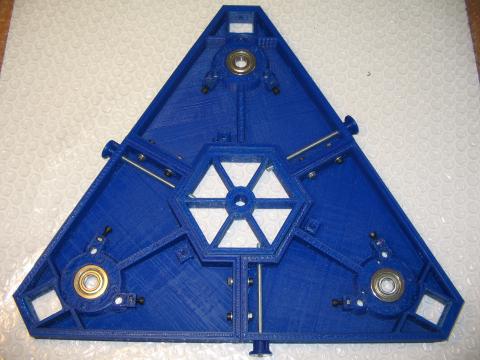
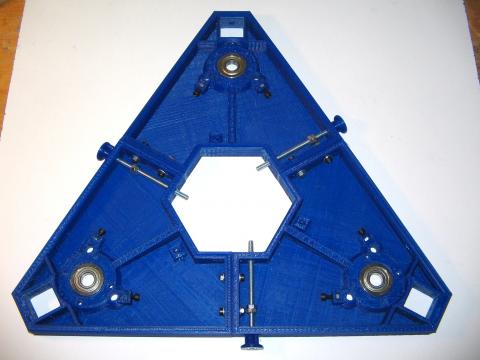
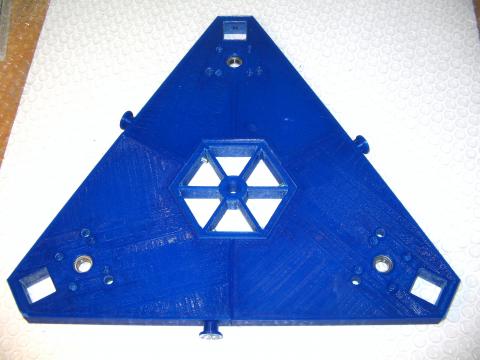
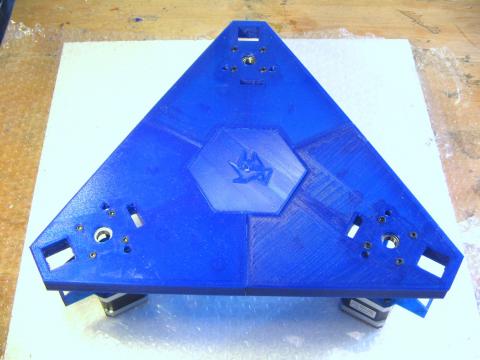
Ya tienes ensamblado el triángulo inferior. Tendrá el aspecto de la siguiente foto.
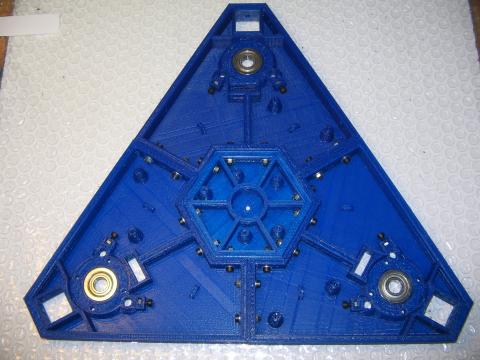
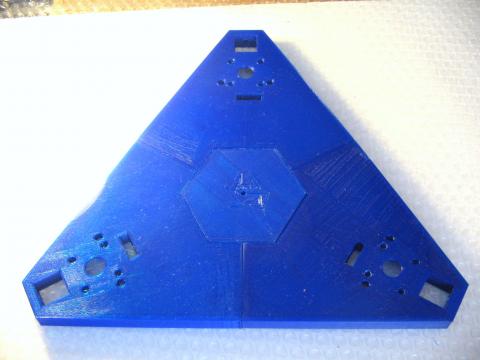
El triángulo tiene que quedar totalmente plano sobre la superficie y con las piezas bien encajadas (el proceso de impresión 3D no es perfecto así que siempre queda algo de espacio entre las juntas pero está asumido)
Ensamblando el Triángulo Superior
Ahora es el momento de ensamblar el triángulo superior.
Toma los tres vértices superiores y juntalos en una superficie plana con la cara superior hacia abajo. Coloca el Hexágono del Rotulador en el centro de los triángulos.
Comprueba que todas las piezas encajan juntas.
Usando un cutter y/o una lima, repasa el lateral de las piezas que encajan con las otras y elimina restos del proceso de impresión 3D. Esto es especialmente importante en el hexágono central y en el agujero hexagonal, ya que el hexágono tendrá que deslizarse por el agujero cuando instalemos el cabezal en el robot.
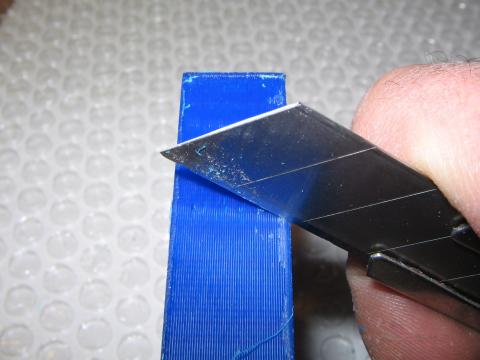
Ahora tienes que eliminar de las piezas de plástico el "Pie de Elefante". Llamamos "Pie de Elefante" a las primeras capas de plástico de la pieza que sobresalen un poco más que el resto. Es donde la pieza reposaba cuando se imprimió en 3D. La encontrarás en los bordes de la cara que parece pulida.
Usando el cutter elimínalo del Hexágono del Rotulador y del agujero hexagonal ya que este pequeño saliente podría rozar con las paredes del agujero al introducir el hexágono en él.

Comprueba otra vez que todas las piezas encajan bien.
Usando brocas de 3,4 y 6mm repasa los agujeros de los tornillos M3, los agujeros M4 y los de 6mm de los ejes de acero respectivamente y de forma similar a como hicimos en el triángulo inferior.

Inserta con el soldador la tuerca M4 opcional en su alojamiento (ver siguiente foto)

Inserta también con el soldador la tuerca M3 del anclaje de la cámara. Ten cuidado no derritas la parte inferior ya que aquí la pared es muy estrecha y puedes calar al otro lado.

Inserta los dos tornillos M3x12mm en los retenedores de los ejes de acero y atorníllalos un poco en las tuercas.

Atención: con la nueva modificación de los husillos no es necesario insertar los rodamientos en los triangulos superiores sino que se instalan en las nuevas piezas que soportan los husillos por su parte superior.
Presionando con los dedos inserta el rodamiento F6900ZZ en su alojamiento.

Comprueba que la Tapa del Rodamiento encaja bien. Marca con un rotulador en ella la posición del agujero de los ejes de acero y usa una cuchilla o el soldador para eliminar un poco de plástico allí (para evitar que los ejes de 6mm tropiecen con ella cuando los instalemos).

Inserta dos ejes de 6mm en los agujeros de los retenedores (ver siguiente foto) y comprueba que encajan bien sin holguras pero deslizándose en ellos.
Aprieta los tornillos de los retenedores y comprueba que retienen los ejes.

Afloja los tornillos y quita los ejes. Los instalaremos más tarde.
Usando una lima o un cutter, repasa el plástico del alojamiento del tubo de aluminio hasta que se deslice bien pero sin holguras.
Repite estos pasos con el resto de vértices del triángulo superior.
Ahora vamos a atornillarlo. Utiliza tornillos M3x16mm de forma similar a como hicimos en el triángulo inferior. De momento aprieta las tuercas solo un poco con los dedos.

Pon el triángulo en la mesa con la superficie superior hacia abajo.

Intenta deslizar el hexágono dentro del agujero hexagonal que forman los vértices. Tiene que deslizar con relativa suavidad, pero encajar bien. Veras que el hexágono tiene unos agujeros de 4mm en sus laterales. Comprueba que estos agujeros coinciden con los de las paredes del agujero hexagonal. Si no coincide dale la vuelta al hexágono hasta que coincidan. Son los agujeros de los retenedores del cabezal y tienen que encajar unos con otros para que a través de ellos pasen las varillas de los retenedores.
Los hexágonos de los cabezales y el agujero hexagonal han sido diseñados teniendo en cuenta una cierta holgura. Pero el proceso de impresión 3D no es perfecto; lo bien que encajen las piezas dependerá de lo bien que esté calibrada tu impresora 3D.
Si la separación entre el hexágono y su agujero es demasiado grande, y el primero desliza sin tocar las paredes, entonces tendrás que apretar en secuencia los tornillos de los vértices hasta que el hexágono encaje bien. Si después de apretarlos al máximo sigue teniendo demasiada holgura, entonces hay que desmontar el triángulo y repasar con lima y cuchilla las paredes de los vértices que tocan entre sí y volver a probar hasta que el hexágono encaje bien y se deslice sin demasiada holgura.
Si por el contrario no puedes insertar fácilmente el hexágono, o éste se atasca en el agujero, entonces hay que aumentar la distancia entre las juntas. Primero repasa el hexágono de nuevo y comprueba que las paredes exteriores están lisas, no tiene "Pie de Elefante", las esquinas están bien definidas, líjalo también un poco, etc. De forma similar, repasa también las paredes del agujero hexagonal y prueba de nuevo. Si sigue atascándose, entonces no hay otra solución que aumentar un poco el agujero hexagonal, para ello hay que aumentar la distancia entre los vértices, usando entre ellos una junta de papel, cartulina o plástico fino.
Instalando los Retenedores del Cabezal
Los retenedores del cabezal son tres varillas roscadas de M4X80mm que como su nombre indican retienen el cabezal en su posición. Las varillas se deslizan por unos agujeros previstos en los vértices y en las piezas hexagonales de los cabezales.
Localiza los materiales: tres Pomos de Retenedor, las varillas M4 y nueve tuercas M4.

Usando una lima redondea ambos extremos de las varillas roscadas M4.

Con el soldador inserta una tuerca M4 en el alojamiento de uno de los Pomos del Retenedor.

Atornilla una varilla roscada dentro del Pomo y de la tuerca insertada en él.

Pega la varilla a la tuerca y al pomo con unas gotas de cianocrilato.

Repite estos pasos con el resto de retenedores.

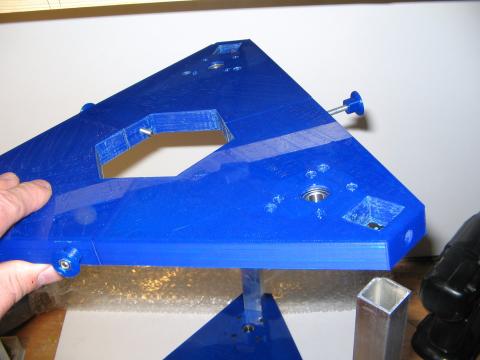
Ahora vamos a instalarlos en los vértices. Inserta primero los retenedores en los agujeros laterales previstos en los vértices, según la siguiente foto.
Pon dos tuercas M4 en una de las varillas según muestra la siguiente foto. Estas tuercas son para delimitar el rango de deslizamiento del retenedor.

Comprueba que la varilla queda a ras de las paredes del agujero hexagonal cuando el retenedor esté en modo "abierto". Entonces, aprieta las tuercas, una contra la otra, usando dos alicates finos.

Haz lo mismo con el resto de retenedores.
Ahora inserta el Hexágono del Rotulador en su posición correcta y desliza los retenedores en sus agujeros. Comprueba que las varillas roscadas se deslizan bien por ellos. Si no, agrándalos con una broca M4.
Desliza varias veces los retenedores dentro y fuera del hexágono, hasta que veas que funcionan bien y no se atascan. Comprueba también que cuando están en modo "abierto" el hexágono entra y sale fácilmente.
El triángulo superior está listo.
Instalando los Motores Nema 17
Ahora vamos a preparar e instalar los motores de pasos Nema 17.
Necesitarás 3 motores de pasos de 40mm de longitud, tipo 42BYGHW609 o similar. Cualquiera de dicha longitud y con un torque de entre 3.400 - 4.000 g/cm servirá, siempre y cuando no consuma más de 2A por fase que es el límite de los drivers.
Primero pega con cola de contacto las piezas de corcho de 42x42x4mm en los motores de pasos.

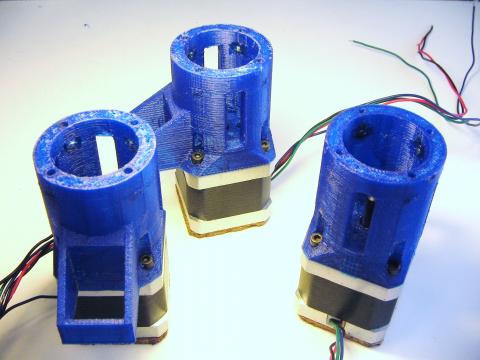
Ahora atornilla a uno de los motores un Soporte del Motor, utilizando para ello cuatro tornillos M3x8mm. IMPORTANTE: los cables del motor tienen que quedar apuntando en dirección contraria al alojamiento del tubo de aluminio (ver siguiente foto).

Ahora tenemos que instalar el acoplador 5-10 del motor. Su misión es conectar el eje del motor que mide 5mm de diámetro con el husillo que mide 10mm de diámetro.

Con una llave alen M2 afloja un poco los prisioneros que están en el lado donde el agujero del acoplador es más pequeño, es decir, el lado del motor.
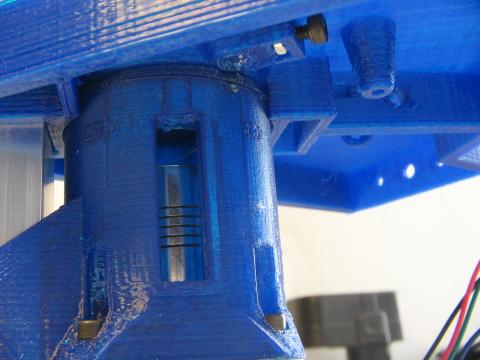
Mete el acoplador dentro del soporte del motor e inserta el agujero de 5mm en el eje del motor de pasos (ver siguiente foto)
A través de una de las ventanas del Soporte del Motor, mueve el acoplador un poco hacia arriba haciendo palanca con un destornillador. El acoplador tiene que estar aprox. a 5mm del fondo del Soporte del Motor.
Una vez esté en posición aprieta en secuencia los dos prisioneros inferiores con la llave alen. Apriétalos poco a poco para que el eje del motor quede centrado.
Repite estos pasos con el resto de los motores.
Ahora vamos a instalar los motores y sus soportes en el triángulo inferior.
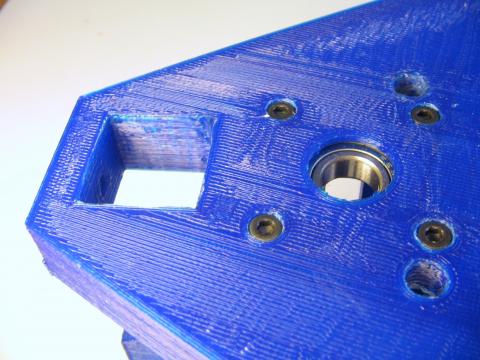
Primero pon una Tapadera de Rodamiento sobre uno de los rodamientos en su posición correcta: con la ranura apuntando a la tuerca M4 y con los agujeros M3 coincidiendo con los agujeros del vértice.


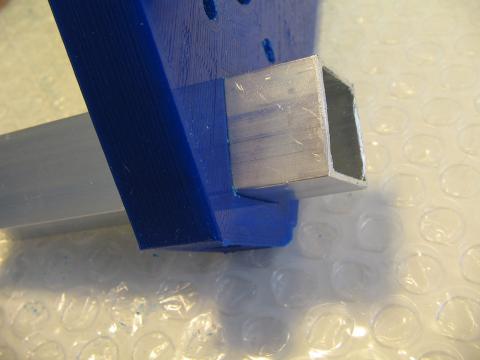
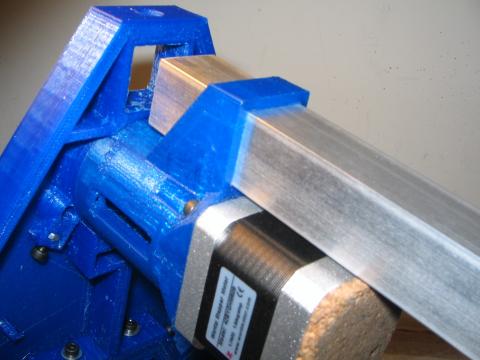
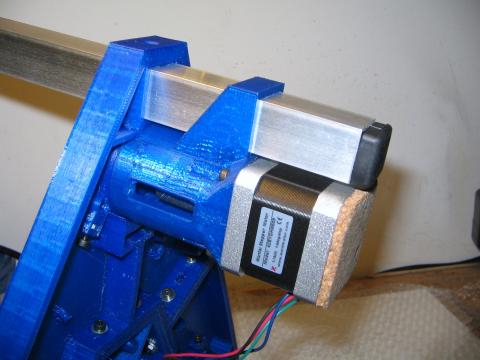
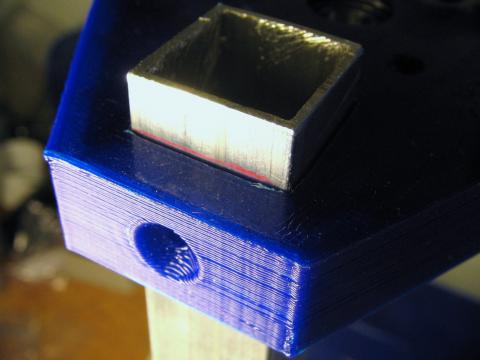
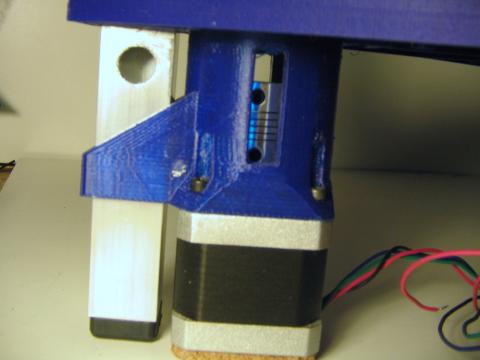
Ahora pon un motor con su soporte encima de la tapadera y encájalo. Comprueba que el alojamiento del tubo cuadrado de aluminio del Soporte del Motor coincide con el alojamiento del Vértice (ver siguiente foto)
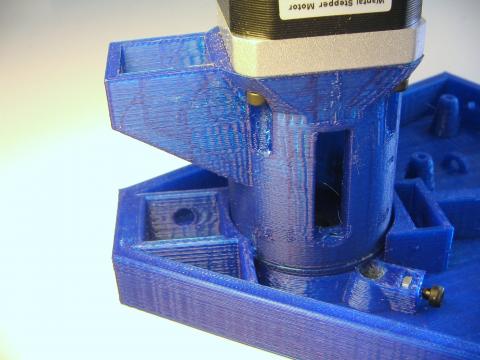
Introduce suavemente uno de los tubos de aluminio a través de los alojamientos del Vértice y del Soporte del Motor. Tiene que deslizar bien. Si no lo hace, repasa los alojamientos del tubo con lima y cuchilla. Si fuese necesario, gira el Soporte del Motor para alinear las piezas.
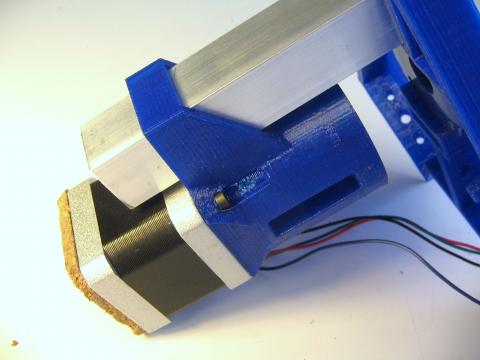
Con el tubo alojado de esa manera, encaja el Soporte del Motor en el Vértice y atorníllalo desde la parte superior con cuatro tornillos M3x20mm (ver siguiente foto)
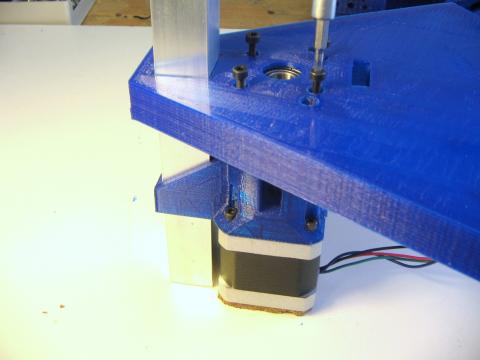
Aprieta los tornillos y desliza fuera el tubo de aluminio, ya que lo hemos utilizado sólo para alinear las piezas. Luego lo instalaremos definitivamente.
Repite estos pasos con los otros motores.
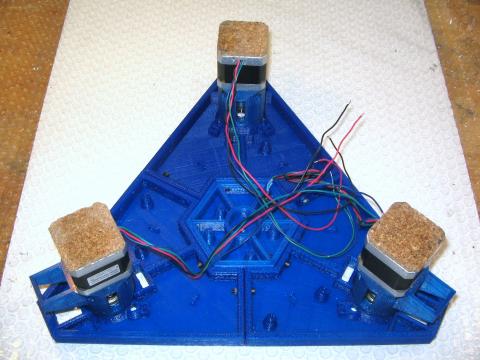
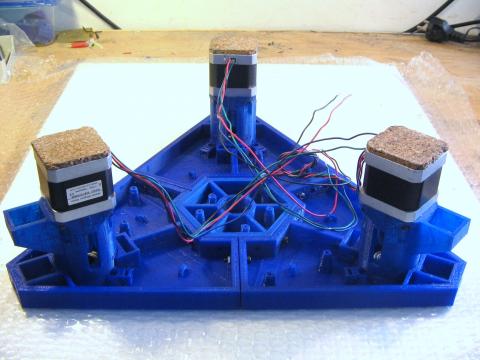
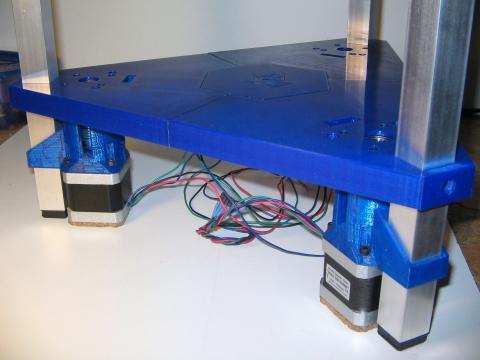
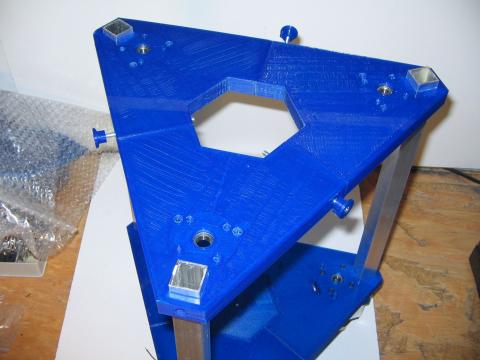
Después de terminar esta tarea el triángulo inferior tendrá el aspecto que muestran las siguientes fotografías:
Instalando los Pilares
Ahora vamos a instalar en sus alojamientos los pilares del bastidor que están compuestos de tres tubos cuadrados de aluminio.
Coge uno de los tubos de aluminio de 20x20mm y con un martillo inserta una de las patas de plástico en uno de sus extremos

Inserta suavemente el tubo en sus alojamientos desde la parte inferior del motor hacia el vértice.
Desliza el tubo hasta que la pata de plástico quede al nivel de la pieza de corcho del motor.
Repite esta operación con los otros tubos.
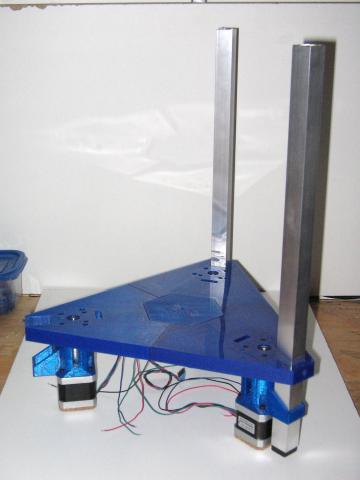

Comprueba que las tres patas de los tubos y el corcho de los motores reposan perfectamente sobre la superficie plana de la mesa y que el triángulo está a nivel.
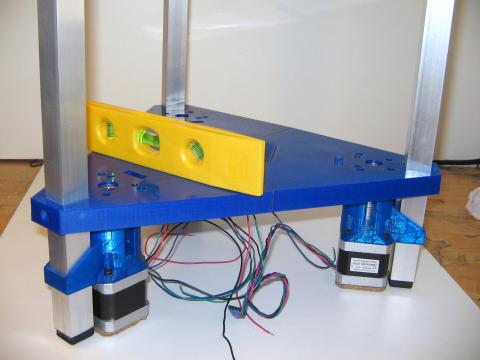
Marca entonces con un rotulador la posición de los taladros de los tornillos M4x30 que utilizaremos más tarde para sujetar los tubos al triángulo.
Ahora vamos a instalar provisionalmente el triángulo superior.
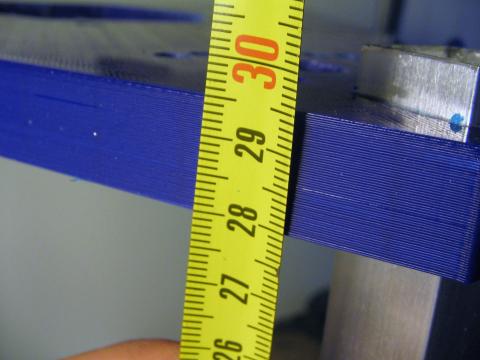
Primero usa un metro o una regla para medir a lo largo de uno de los tubos de aluminio. Marca con el rotulador exactamente a 295mm desde la cara superior del triángulo inferior y repite con los otros tubos.

Inserta en los tubos el triángulo superior poco a poco, hasta que la parte superior del triángulo llegue a las marcas que hiciste anteriormente.
Comprueba de nuevo que la distancia desde la superficie del triángulo inferior a la superficie del superior es de 295mm. Ajústala moviendo cada vértice del triángulo superior arriba y abajo si fuese necesario.
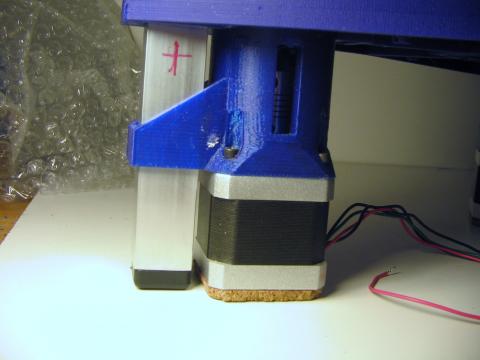
Ahora, sin mover el triángulo superior de su posición, marca en cada tubo el taladro del tornillo M4x30.
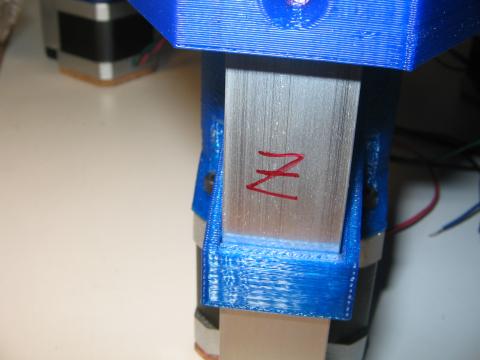
Con el rotulador tenemos que marcar también con una letra cada pilar. Necesitamos estas marcas porque los vamos a desinstalar para taladrarlos y luego tendremos que colocarlos de nuevo en la misma posición. El robot tiene 3 ejes: X,Y,Z. Mira de frente al bastidor y verás en el Hexágono Inferior el logo de Diyouware (es un gato). Si ves el logo en su posición correcta con el gato de pie, entonces a tu izquierda tendrás el eje X, a tu derecha el eje Y y al fondo el eje Z. Marca cada tubo con la letra que le corresponda.
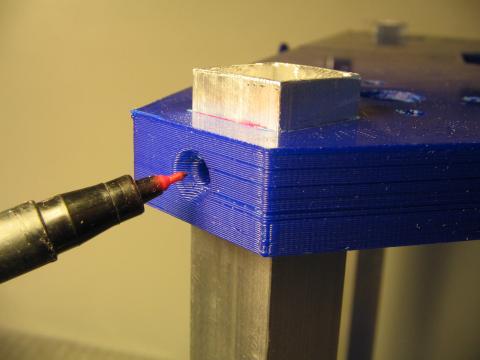
Haz una marca también en el tubo del eje Z (ver siguiente foto) para hacer un taladro de 10mm y pasar por dentro del tubo los cables que van desde el Arduino al conector DB15 de la parte superior del robot.
Ahora es el momento de taladrar los agujeros.
Primero desliza el triángulo superior fuera de los tubos. Luego desliza los tubos hacía abajo, fuera de los alojamientos del triángulo inferior.

Usando un botador marca la posición de los taladros en las marcas que hiciste anteriormente.

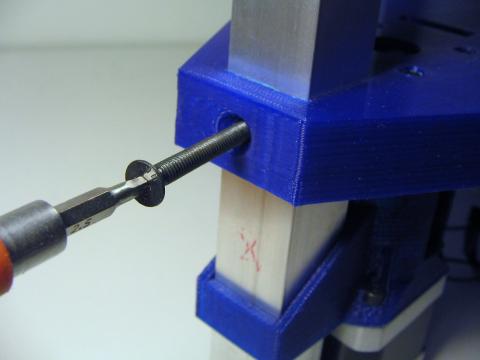
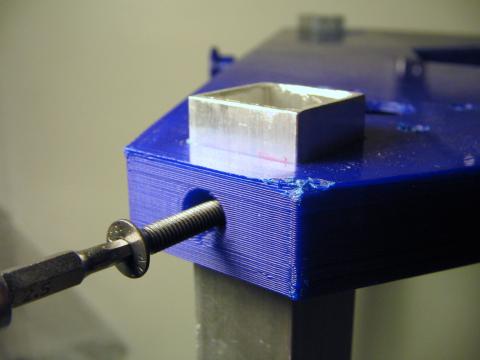
Taladra los agujeros de extremo a extremo del tubo usando una broca de 3.5mm de diámetro. El tornillo es realmente de 4mm pero el agujero tiene que ser algo más pequeño porque vamos a enroscar el tornillo en el propio tubo. El aluminio es blando así que podemos hacer la rosca con el propio tornillo. Puedes hacer la rosca ahora que te será más fácil. Utiliza una gota de aceite.

Usa una broca de 10mm para hacer el agujero pasa cable.
Consejo: Es más fácil insertar ahora el cableado que va por dentro del tubo que posteriormente. Necesitarás instalar 15 cables flexibles, CAT5 o similar de los usados en redes Ethernet. La corriente máxima será de 1A por cable para los cuatro cables del motor del extrusor. Tienes que instalar también un cable blindado fino de una vía + malla para la señal de FE. Nosotros hemos utilizamos un cable de auricular de teléfono móvil o de lector MP3. La longitud de los cables: de momento será suficiente con unos 700mm. Luego los puede ajustar a su longitud definitiva cuando hagamos el cableado.
Inserta de nuevo los tubos de aluminio en el triángulo inferior. Comprueba que la letra que pusiste coincide con la posición correcta de los ejes del robot.
Comprueba también que el triángulo está nivelado y las tres patas de plástico y los motores reposan sobre la mesa. Luego fija el triángulo inferior a los tubos usando tres tornillos M4x30. Si no lo hiciste antes, tendrás que roscar el tornillo en el aluminio. Una gota de aceite te ayudará. Atorníllalo lentamente, hacia adelante y hacia atrás, haciendo la rosca en las paredes del tubo. Luego aprieta el tornillo con cuidado de no romper la pieza de plástico.
Consejo: utiliza un pequeño trozo de lámina de plástico o de cartulina para llenar cualquier hueco entre el tubo de aluminio y su alojamiento en el Soporte del Motor. Eliminar estos huecos dará mayor solidez al bastidor.

Ahora inserta de nuevo el triángulo superior y fíjalo de forma similar con tres tornillos M4x30.
El bastidor está terminado y tendrá el siguiente aspecto:

Al final de este capítulo tendrás el bastidor ensamblado y listo para instalar los sistemas móviles en él.
Capítulo anterior Indice Home Siguiente capítulo