
TwinTeeth - Imprimir, cortar y preparar los materiales
Imprimiendo las Piezas 3D
Antes de comenzar el ensamblado de TwinTeeth debes obtener o imprimir las piezas de plástico del bastidor.
Si compraste el Kit de Piezas Impresas del Bastidor entonces puedes ir a la siguiente sección: Preparando las Piezas 3D.
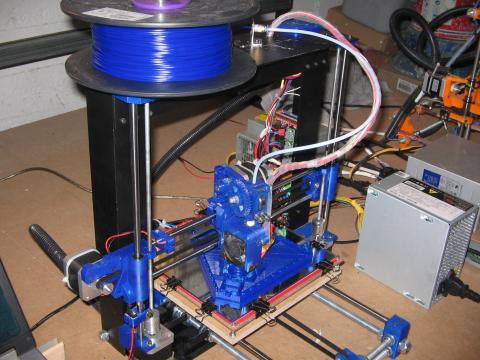
En nuestro caso utilizamos una Prusa I3 muy modificada (ya hablamos de ello en nuestro blog). La hemos reforzado porque están imprimiendo casi 24 horas del día. Pero puedes utilizar cualquier otra impresora con un área de impresión de al menos 170x170mm.
Los ficheros .STL de las piezas los encontrarás en la página Cómo Obtenerla.
Muy importante: antes de imprimir las piezas asegúrate de que tu impresora está calibrada correctamente porque de lo contrario las piezas serán más grandes o más pequeñas que las especificaciones y esto podría afectar la calidad final del robot. Las desviaciones de impresión de más 0.20-0.30mm podrían no ser aceptables y probablemente tendrás que ajustar los parámetros de la cinemática delta en el firmware, lo cual no es deseable.
Nosotros imprimimos lo más rápidamente posible (dependiendo de la pieza) y con el menor relleno posible. De esta manera las piezas son fuertes y ligeras a la vez. Algunas de ellas son realmente grandes y el proceso de impresión tarda dos o más horas así que optimizamos lo mejor que podemos el tiempo de impresión. Al imprimir piezas grandes, como los vértices, es importante calentar la cama por lo menos a 60ºC porque de lo contrario puedes tener problemas de adhesión. La causa principal de la mayoría de los fallos de impresión 3D es algún tipo de problema de adherencia. Si la primera capa no se pega bien a la cama de impresión no hay nada que hacer.
Utilizamos Cura para el Slicing pero puedes usar tu Slicer favorito.
Con Cura, imprimimos: las piezas grandes con 12-15% de relleno, las pequeñas con 20% y utilizamos 40% en piezas como los Carros o el Efector que necesitan soportar cargas. Recomendamos un relleno de 100% para las piezas pequeñas, como los mandos de los retenedores de los cabezales. La velocidad de impresión varía de: 30mm/s para piezas pequeñas a 80mm/s para las grandes. Usamos 195mm/s para desplazamientos y 80-120mm/s como velocidad de relleno.
Tendrás que usar material de soporte si ves que es necesario, por ejemplo en el Soporte del Motor.
Preparando las piezas 3D
En primer lugar identifica todas las piezas 3D y familiarízate con ellas.
El bastidor de TwinTeeth está compuesto por dos triángulos equiláteros unidos por tres tubos cuadrados de aluminio de 20x20mm a modo de "pilares". Estos triángulos están compuestos a su vez por tres "vértices" idénticos unidos entre sí con tornillos. Necesitarás seis de estos vértices para completar los dos triángulos.
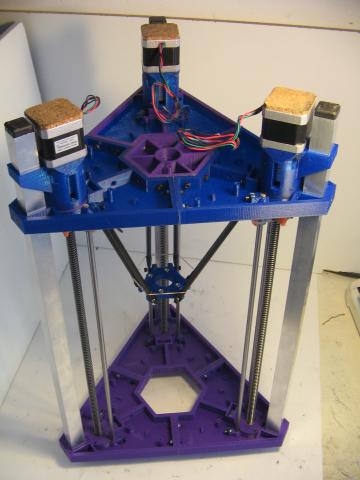
La siguiente imagen muestra el robot y su bastidor boca abajo.
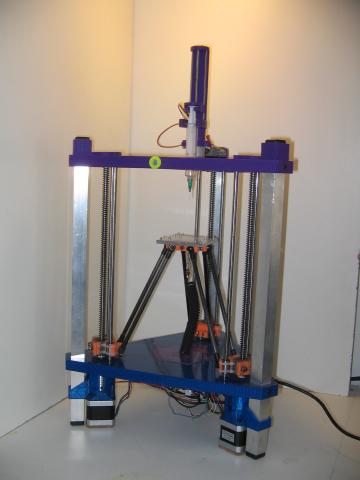
En la siguiente imagen el bastidor está en su posición normal. En este caso con el Cabezal Dispensador de Pasta de Soldar instalado.
Los triángulos superiores e inferiores son algo diferentes. El inferior incluye los micro-interruptores de fin de carrera y los soportes de la PCB del Arduino, mientras que los superiores no. En cambio los vértices superiores tienen un agujero en los laterales para insertar el Retenedor del Cabezal: una varilla roscada M4x80mm.
El triángulo inferior está completo en toda su área e incluye en el centro la parte 3D denominada "Hexágono Inferior" (la pieza con el logo de Diyouware), mientras que el triángulo superior está abierto en el centro para poder insertar los diferentes cabezales.
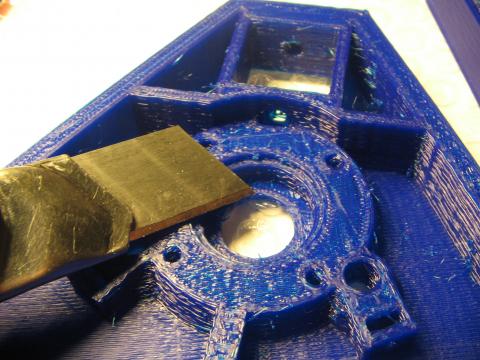
Te recomendamos que revises todas las piezas de plástico antes de montar TwinTeeth. Retira también con un cutter los restos de material de soporte, briznas, hilos, restos de filamento, etc. que podrían quedar durante el proceso de impresión 3D. Imprimimos las piezas muy rápido así que a veces tienen un montón de hilos, sobre todo las piezas grandes.
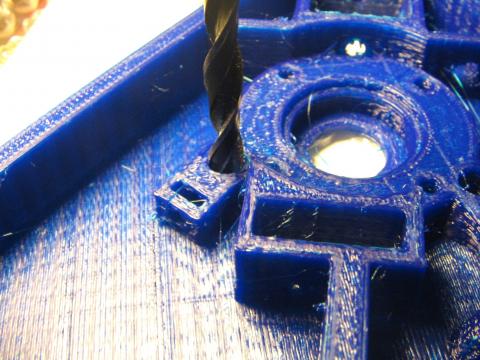
Comprueba también que el diámetro de los agujeros es el correcto para ejes, tornillos y los tubos cuadrados de aluminio que tienen que pasar a través de ellos.

Usa una broca de diámetro adecuado para repasar los agujeros.
Comprueba también el alojamiento de los tubos de aluminio y usa el cutter si es necesario para repasarlos y que entre el tubo bien. El tubo tiene que pasar a través del alojamiento pero sin demasiada holgura.
Imprimimos (y recomendamos hacerlo) con plástico PLA. El PLA es un termoplástico ecológico que funde entre 190-220ºC así que se puede utilizar un soldador de baja potencia para derretirlo ligeramente y adaptar así las piezas. Si alguna pieza está rota puedes pegarla con cianocrilato. La acetona y disolventes similares no interactúan con el PLA y puedes usarlos para limpiar restos de pegamento si hiciera falta.

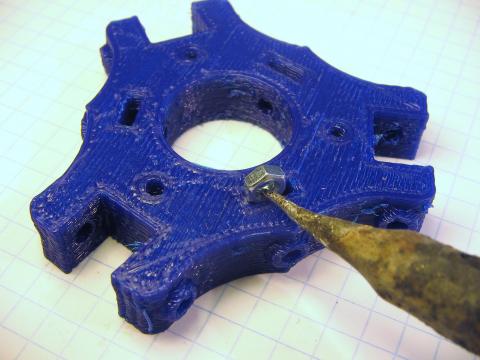
La mayoría de las tuercas M3 y M4 usadas en TwinTeeth están alojadas en piezas de plástico. Hay que insertarlas en los alojamientos previstos para ellas. Recomendamos para ello el uso de un soldador. Simplemente tenemos que calentar la tuerca un poco y presionarla hacia abajo con la punta del soldador o con un destornillador (con cuidado de no derretir el resto de la pieza). Utiliza si puedes un soldador viejo porque su punta generalmente termina sucia con un montón de plástico.
Algunas tuercas que van en posición invertida podrían separarse durante el proceso de montaje. Un truco es derretir con el soldador un poco de plástico alrededor de la tuerca y pegarla con él al agujero para evitar que se salga.
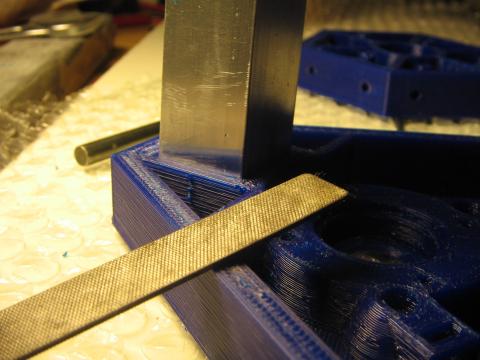
Comprueba también que los rodamientos F6900ZZ encajan en sus alojamientos (ver foto).

Si no encajan bien utiliza un cutter o una lima para limpiar el alojamiento de restos de plástico o agrandarlo. En caso de que el rodamiento entre demasiado holgado, utiliza un poco de cinta de teflón alrededor de él para que ajuste perfectamente.
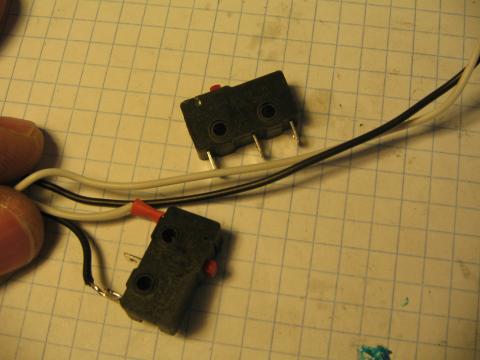
Comprueba que los tres micro-interruptores de fin de carrera (en la foto superior) entran bien en sus alojamientos (una caja rectangular que está entre los soportes de los ejes de 6mm). Los instalaremos más adelante, en la sección de cableado, pero en esta fase es más fácil limpiar el alojamiento y comprobar que encajan bien en él.
Prepara también las tapas de los rodamientos. Necesitarás seis de estas piezas: tres para los vértices superiores y tres para los inferiores. Comprueba que las tapas encajan en su lugar, sobre los rodamientos F6900ZZ, y utiliza una lima, una broca o el soldador para ajustarlas, si fuese necesario.

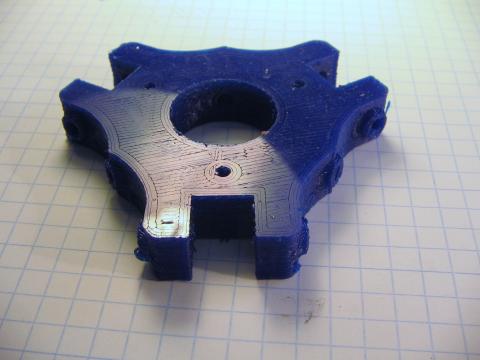
Ahora es el momento de preparar los soportes de los motores.

Retira con un cutter los restos del material de soporte del alojamiento del motor. Limpia también los agujeros de montaje del motor con un broca M3 y utiliza una Lima para limpiar restos de plástico, filamentos, etc.

Limpia también los agujeros M3 de la parte superior de la pieza.
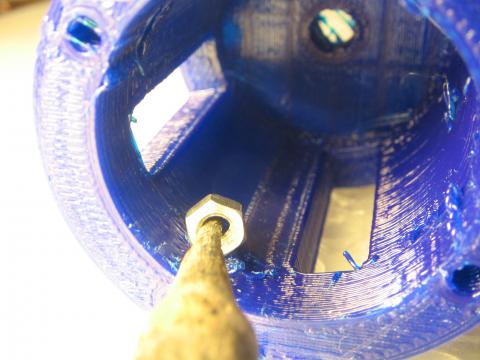
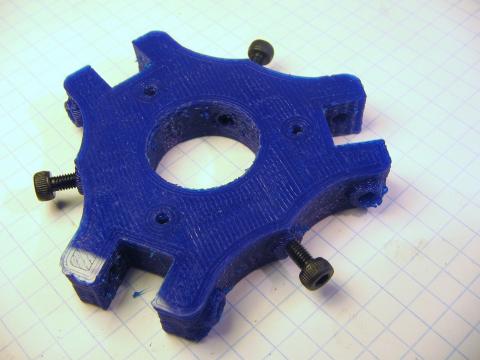
Y con el soldador, inserta cuatro tuercas M3 en los alojamientos previstos dentro del Soporte del Motor (ver foto superior). Estas tuercas sujetan el Soporte del Motor al triángulo inferior a través de los orificios de la parte superior del Soporte.
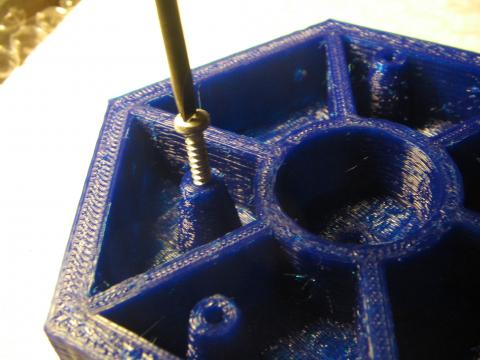
Finalmente tienes que "termo-roscar" los soportes del Arduino. Estos actúan como soportes de PCB y fueron diseñados para alojar tornillos de rosca chapa. 2,5 mm
Para hacer la rosca: calienta con el soldador un tornillo, sujétalo con pinzas o unos alicates para evitar quemarte, y atorníllalo algunas vueltas, poco a poco, hasta que consigas hacer el roscado. Repite el proceso en todos los soportes de PCB del triángulo inferior y del hexágono inferior.
Cortando los husillos, los ejes de acero y los tubos
Si no compraste el Kit del Hardware del Bastidor entonces necesitarás cortar los husillos, ejes, tubos, etc. con una sierra de metal.
Atención: a partir de la versión 1.3 utilizamos husillos de 200mm. Ver blog.
Primero corta tres husillos de 200mm de largo y redondea los bordes con una lima y lija.

Después corta los ejes de 6mm. Son los ejes lineales X,Y,X por donde se mueven los carros y tienen 304mm de longitud. Necesitarás 6 piezas de 304mm.

Redondea también las puntas de los ejes con una lima y lija fina para prevenir dañar los rodamientos lineales cuando insertes los ejes en ellos.
Corta ahora los tubos de aluminio a 400mm de longitud.

Ahora tienes que cortar los tubos de fibra de vidrio a 136mm de longitud. Un truco para que no se deshilachen los tubos al cortarlos es poner un poco de cinta de papel adhesiva justo donde hagas el corte. Después de hacerlo la quitas y listo.

Finalmente tienes que cortar:
- 3 PCS de varilla roscada M4 x 80mm para los Retenedores de los Cabezales.
- 12 PCS de varilla roscada M3 x 10mm. Las necesitarás para pegar los tubos a las rotulas de bola.
Preparando las Varillas Delta
Necesitaras seis varillas de estas. Son de fibra de vidrio. También doce rotulas de bola y 12 varillas roscadas M3 x 10mm, las que cortaste en el paso anterior.
Primero necesitarás hacer una plantilla que te ayudará a construir las seis varillas exactamente de la misma longitud. Es más importante que todas sean de la misma longitud a que todas sean algo más largas o más cortas. Esto último se puede corregir en el firmware, pero si las varillas no son todas iguales el robot no funcionará bien.
Puedes usar una pieza de contrachapado, MDF o aluminio para hacer la plantilla. Nosotros hemos usado aluminio porque da más precisión a la hora de taladrar.

Taladra dos agujeros en el soporte de la plantilla exactamente a 170mm de longitud el uno del otro y atornilla desde la parte trasera dos tornillos M3 con us respectivas tuercas (por delante).

Ahora tienes que insertar las bolas en el alojamiento de la rotula. Simplemente presiona la bola con los dedos hasta que entre en él. Repítelo con todas las rotulas.
Atornilla ahora las varillas M3 x10mm en cada extremos del tubo y pégalas con pegamento Epoxy rápido. Asegúrate que dejas la mitad de la varilla roscada fuera del tubo de fibra, es decir unos 5mm, y limpia los restos de Epoxy que pudieran quedar. Repite esto con todas las varillas. Deja curar el Epoxy.

Una vez curado el Epoxy, atornilla dos rotulas con sus bolas en las varillas M3 que sobresalen de los tubos y coloca todo el conjunto en la plantilla, insertando el eje de las bolas en los tornillos de la plantilla. No lo pegues todavía, simplemente comprueba que todo encaja bien.
Desinstala todo de la plantilla. Aplica pegamento Epoxy a las varillas M3 y atornilla las rótulas. Inserta otra vez todo en la plantilla y ajusta las rotulas y la varilla hasta que queden rectas, alineadas y de la longitud correcta. Recuerda: el objetivo es hacer seis varillas exactamente de la misma longitud (170mm medidos desde el eje de la bola de un extremo, al eje de la otra bola).
Deja curar el Epoxy y repite el proceso con el resto de las varillas.
Al final de esta sección tendrás algo similar a esto:

Un truco: las rótulas de bola suelen tener un cierto juego en la carcasa de plástico que las aloj. Esto podría producir "backlash" en el robot. Un consejo para resolver el problema es darle un pequeño golpe al plástico que rodea la bola. Utiliza para ello un tubo metálico redondo de 5mm de diámetro interior x 6mm de diámetro exterior. Nosotros usamos un trozo de tubo de una antena telescópica vieja. Tienes que poner el tubo encima de la bola, insertándola dentro de él, y darle al tubo un pequeño golpe con un martillo para deformar un poco el plástico que rodea la bola, pero ligeramente porque sino puedes dañar la carcasa de la rótula. A continuación, comprueba que la bola se mueve en su alojamiento con menos holgura.


Moldeando las Tuercas Anti-Backlash
Las seis mitades de tuerca usadas por TwinTeeth están incluidas en el Kit del Hardware del Bastidor. Si compraste dicho kit puedes saltarte esta sección e ir directamente a la siguiente: Preparar el Carro LM6UU.
Backlash (dificil traducción al Castellano) es un movimiento generalmente indeseable que se produce en determinados mecanismos, como engranajes, poleas, correas, husillos, etc. Está causado por el espacio o "juego" que hay entre las piezas que lo componen. Normalmente se evidencia cuando el mecanismo cambia de dirección. Su consecuencia es que el mecanismo pierde precisión. En máquinas CNC o impresoras 3D se aprecia muy bien en los círculos que aparecen cuadrados. En teoría, lo ideal sería tener cero Backlash, pero en la práctica debe permitirse algún juego entre las piezas para evitar que se atasquen.
En TwinTeeth hemos resuelto el problema del Backlash utilizando medias tuercas moldeadas a la medida del husillo y tensadas con muelles de acero. Hay por lo menos dos métodos de bajo coste para hacer tuercas anti-backlash a la medida del husillo. Uno es moldeando la tuerca con resina Epoxy (y algunos aditivos que alteran sus propiedades físicas). El otro se basa en "termo-formar" (con una pistola de calor) una pre-forma impresa en 3D de la tuerca. Hemos probado ambos métodos y los dos funcionan bien, pero finalmente nos decidimos por el primero porque es más preciso y predecible.
Utilizamos Epoxy para fabricación de moldes y agregamos 10% de polvo de bronce y 1-2% de grafito en polvo. Estos dos componentes ayudaran al Epoxy a reducir su coeficiente de fricción y le proporcionaran a la vez dureza y durabilidad. Una vez depositada la mezcla en el molde curamos el Epoxy 24h en un horno a 25 ºC.
Podría parecer que utilizar tuercas Epoxy no es una buena práctica en ingeniería mecánica, pero funcionan muy bien y hacen su trabajo. Las hemos usado en nuestro prototipo prácticamente todos los días durante más de un año, y no nos han dado ningún problema. Pero lo más importante es que encajan perfectamente en los husillos, resbalan bien y no producen Backlash. Probablemente no duren para siempre, pero son muy fáciles de fabricar en casa y podemos reemplazarlas nosotros mismos por poco dinero. La alternativa a la tuercas Epoxy es usar tuercas de bronce pero son caras, no resuelven los problemas de backlash o son difíciles de adaptar para eliminarlo (normalmente consiste en cortar la tuerca para cerrarla y que ajuste mejor).
A continuación os mostramos la formula para fabricarlas, por si decidís hacerlo vosotros mismos:
Necesitaréis los siguiente materiales:
- 2PCS 3D x Molde de Media Tuerca
- 100mm de husillo
- Cera de desmoldear
- Resina Epoxy
- Polvo de bronce* y de grafito
- Un poco de plastilina
*El polvo de bronce es opcional.
Primero aplica la cera de desmoldear al molde y al trozo de husillo. Tienes que aplicar varias capas y dejar secar la cera al menos una hora entre capas. Elimina el exceso de cera y espolvorea algo de grafito en el husillo.

Junta los dos moldes y pon el husillo encima de ellos. Coloca algo de plastilina en ambos extremos, justo donde encaja el husillo, para evitar que la resina se salga fuera del molde.

Mezcla los dos ingredientes de la resina Epoxy. Añade los aditivos y mezcla todo bien durante algunos minutos. Deposita la resina en el molde suavemente, sin dejar burbujas.
Gira suavemente el husillo en ambos sentidos con los dedos. Es para que la resina penetre bien en la rosca. Añade más resina si es necesario hasta que quede a ras del molde pero sin salir del hueco.
Deja curar la resina al menos 24H en un ambiente seco y a más de 20ºC (El Epoxy cura mejor por encima de 25ºC).
Una vez curado el Epoxy, desmoldea las tuercas y elimina con un cutter el exceso de material. Lija la cara interior de cada media tuerca hasta que quede plana, sin dañar la rosca, y comprueba que encajan bien entre ellas.

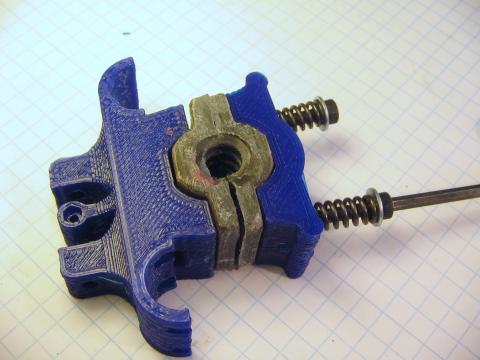
Taladra los agujeros y comprueba que las medias tuercas encajan bien con el husillo dentro. Gira el husillo con la mano para comprobar que la tuerca se desliza bien por él. Las medias tuercas tienen que tener algo de juego y no tienen necesariamente que tocarse entre sí. Dependerá de cuanto las haya lijado. Pero es mejor que queden un poquito holgadas; luego usaremos unos muelles y tornillos para ajustarlas. Al instalarlas en el robot no pueden quedar muy prietas ya que podrían atascar el husillo.
Desmonta el conjunto y atornilla dos M3 x 10mm en los agujeros. Pon las correspondientes tuercas cerrando las dos medias tuercas. Lija un poco la superficie exterior para ajustar una tuerca con otra.
Están lista para usarse. Mantenlas juntas con los tornillos hasta que tengas que instalarlas en el robot.

Preparando los Carros LM6UU
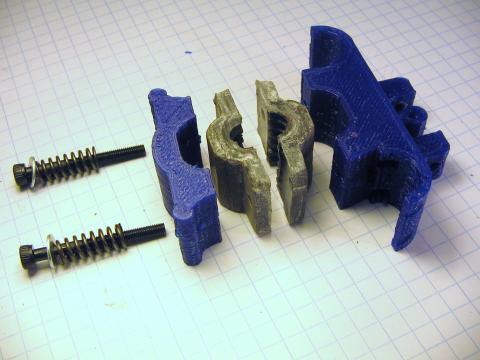
Los carros son las partes que mueven las varillas delta del robot a lo largo de los ejes de acero de 6mm y del husillo. Se componen de dos partes principales: el Carro LM6UU y la Mordaza del Carro (ver siguiente foto).

El carro aloja dos rodamientos lineales LM6UU que son los que lo deslizan por los ejes.
En un extremo tiene atornilladas dos varillas delta. Por el otro tiene la tuerca anti-backlash que lo une al husillo. Una mitad de la tuerca está unida al carro y la otra a la mordaza. En medio el husillo. Todo el conjunto va atornillado con dos M3x30mm, dos arandelas M3 y dos muelles (ver siguiente foto).
Ahora vamos a preparalos.
Primero limpia los agujeros con una broca 3mm, elimina restos de plástico, filamentos, etc.
IMPORTANTE: no uses la broca en los agujeros dónde iran atornilladas las rótulas de los brazos delta ya que es mejor que los tornillos hagan la rosca en el plástico para que no queden holguras.
Luego localiza un rodamiento lineal LM6UU y comprueba que encaja bien en el alojamiento del carro. Usa un cutter o una lima para eliminar posibles restos de plastico y prueba hasta que encaje bien en el alojamiento. El alojamiento es flexible. Veras que el rodamiento no encaja perfectamente en él si no ejerces cierta presión con los dedos. No te preocupes, luego con las bridas quedarán en su posición correcta.

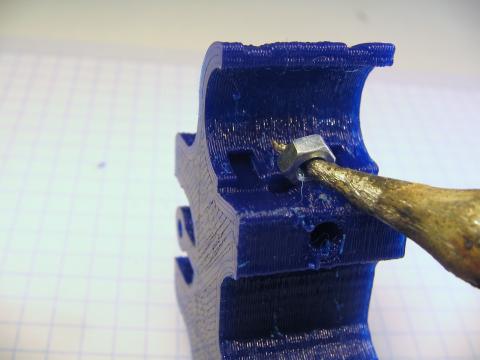
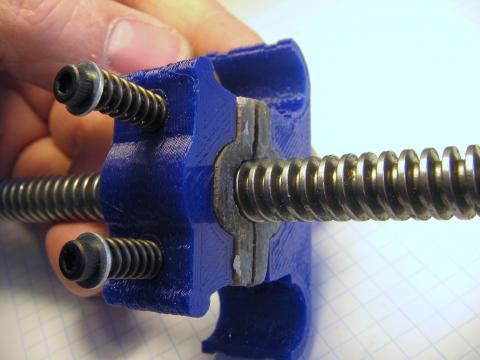
Con el soldador inserta dos tuercas M3 en sus alojamientos (son para unir todas las piezas con los tornillos). Aplica un poco de plástico derretido alrededor de ellas para que no giren y no se salgan de ellos.
Localiza el tornillo y tuerca de ajuste de final de carrera. Es un pequeño tornillo M2x14mm de cabeza plana. Rosca la tuerca en él y atornilla todo el conjunto en el agujero previsto en el plástico. Este tornillo es el que toca en el micro-interruptor de fin de carrera al hacer "home".
Comprueba que la tuerca anti-backlash encaja bien en el Carro y la Mordaza. Ensambla todo el conjunto con los tornillos según la siguiente foto.
Si fuese necesario ajusta con una lima o lija la cara exterior de la tuerca anti-backlash hasta que encaje bien en las piezas de plástico.
Quita los tornillos y la mordaza. Ahora vamos colocar un husillo encajándolo en la media tuerca del carro, pero antes pon un poco de polvo de grafito en ambas mitades de la tuerca anti-backlash. Cierra todo con la Mordaza y los tornillos, dejando el husillo entre las dos tuercas, enroscado en ellas.
IMPORTANTE: para lubricar las tuercas anti-backlash y los husillos no utilices aceite o grasa, sólo polvo de grafito (incluido en el kit).
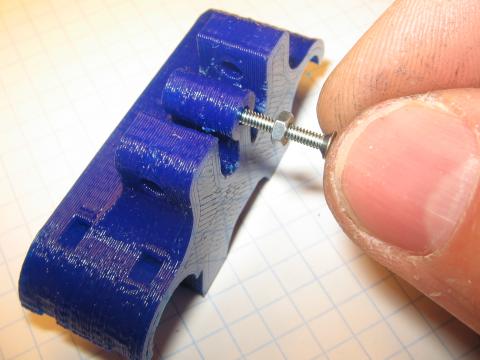
Los muelles estándar del diámetro requerido (4mm ID) son algo largos: 15mm. Cortalos por la mitad con un corta alambres y usa cada una de las mitades en cada tornillo.

Ahora, aprieta un poco los tornillos M3. Los muelles son fuertes y si los aprietas demasiado verás que el carro se atasca. Tiene que moverse suavemente a través del husillo. Si ves que los resortes aprietan demasiado o son demasiado largos, ajústalos cortando un poco los anillos. Utiliza el cortador de alambre y corta hasta que veas que los tornillos llegan a las tuercas fácilmente, enroscan en ellas y los muelles ejercen la presión suficiente para que se mueva el carro por el husillo pero sin atascarse.
Consejo: una vez que veas que el carro se desliza bien y sin problemas a través del husillo, pega con Epoxy rápido una mitad de la tuerca anti-backlash al Carro y la otra mitad a la Mordaza (en sus posiciones correctas y sin el husillo en medio). Atornilla ambas piezas con los tornillos M3 y muelles hasta que cure el Epoxy. Ten cuidado de no contaminar con Epoxy otras piezas como las tuercas, tornillos, muelles, etc. Esta modificación no es estrictamente necesaria, pero mejora la precisión del robot. Pegar las medias tuercas a las piezas de plástico evita posibles holguras entre las partes.
Finalmente introduce cuatro bridas de plástico de 2.5x100mm en los agujeros previsto en el carro. Puedes ver como en la siguiente fotografía. Son para fijar los rodamientos lineales LM6UU (en próximos capítulos).
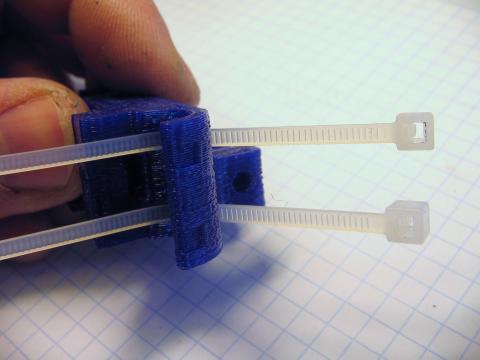
Repite estos pasos con el resto de los carros.
La plataforma de Fijación
La plataforma o "cama" de fijación es una pieza de aluminio que permite sujetar en ella la PCB o el material que queramos procesar.
El sistema completo de sujeción está compuesto por las siguientes piezas:
- La plataforma de fijación.
- La plantilla para taladrar la PCB.
- El tubo de fijación de la plataforma.
- Un tornillo M3x8mm.
- Un conector de una vía.
- Una pieza de 2.5mmx15mm de alambre de cobre.
- Un cable flexible en espiral.
- Una pieza de contrachapado de sacrificio de 2.5mm de grosor.
- Una broca de 2.5mm.
- Algunos pines de precisión de 2.5mm de diámetro x 6mm/8mm de largo.
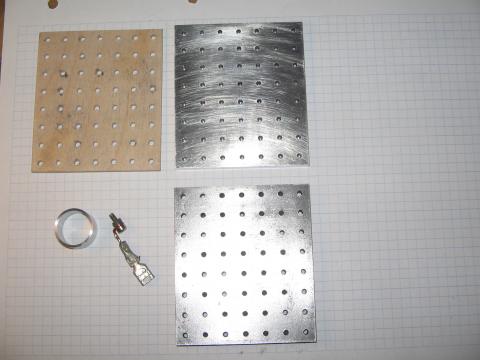
La plataforma está fabricada con una pieza de aluminio de 5mm de grosor taladrada con agujeros de 2.5mm de diámetro en una matriz de 10x10mm. Los agujeros son de 4.2mm de profundidad, es decir, no calan. Estos agujeros alojan los pasadores que sujetarán la PCB a la plataforma.
El tubo va alojado en la parte trasera de la plataforma, en un fresado que se practica en ella. Sirve para sujetar la plataforma al Efector.
El tornillo M3, el conector y el alambre de cobre conectan la plataforma al Arduino a través del cable en espiral. Esta conexión la utiliza el sistema de auto-nivelado de la plataforma.
La plantilla de taladrar se utiliza para taladrar los cuatro agujeros de las esquinas de la PCB. Estos agujeros tienen que coincidir exactamente con los de la plataforma y hacerlos sin la plantilla es prácticamente imposible.
El proceso de preparar una PCB nueva para sujetarla a la plataforma es el siguiente:
1.- Cortar la PCB al tamaño adecuado y taladrar cuatro agujeros de sujección utilizando la plantilla.
2.- Sujetar la PCB a la plataforma con cuatro pines de 2.5mm
El sistema permite total precisión. Mantiene la PCB en su sitio mientras se mueve la plataforma y nos permite alinear el circuito cuando imprimimos a doble cara.
El contrachapado de sacrificio es opcional y sólo se utiliza para taladrar.
El tubo de aluminio permite girar la plataforma dentro del agujero de Efector y alinearla correctamente con el resto de los ejes del robot. Una vez alineada se mantiene en su sitio mediante tres tornillos M3.
Fresando y Taladrando la Plataforma
Si compraste la plataforma en nuestra tienda o la encargaste a fabricar puedes saltarte esta sección e ir directamente a: Preparar la Plataforma de Fijación.
Para fresar y taladrar la plataforma necesitarás una máquina o fresadora CNC. Puedes hacerlo con una máquina que no sea CNC pero tendrás que tener mucha experiencia en manejarla con precisión.
Primero hay que cortar dos piezas de aluminio de 70x80x5mm: una para la plataforma y otra para la plantilla. Puedes usar cualquier tipo de aluminio, preferiblemente blando de la serie 2000 o similar.
Corta también una pieza de tubo de aluminio de 20mm OD x 2mm de pared x 10.5mm de longitud
Taladra el agujero del tornillo M3 justo en el centro de la plataforma, parte trasera y róscalo un poco con una terraja. Es muy poco profundo 0.3-0.4mm, lo justo para enroscar un par de hilos del tornillo, ten cuidado no traspases al otro lado que arruinarías la plataforma.
Taladra los 56 agujeros de la matriz de 10x10mm. Los agujeros son de 2.5mm de diámetro. IMPORTANTE: son de 4.2mm de profundidad, es decir, no tienen que traspasar. Si traspasaran los pines resbalarían fuera de la plataforma y no serviría para nada el sistema de sujeción.
Finalmente taladra la plantilla. Los agujeros tienen que coincidir con exactitud con los de la plataforma. Son también de 2.5mm de diámetro, pero en este caso sí traspasan los 5mm del grosor del aluminio.
Para taladrar estos agujeros tendrás que usar una broca de 2.40-2.45 ya que los agujeros siempre quedan algo más grandes que la broca.
Preparando la Plataforma de Fijación
Para prepararla (una vez la hayáis comprado o fabricado) es necesario hacer lo siguiente:
Encaja en el fresado de la parte trasera de la plataforma y pega con Epoxy de aluminio el tubo de 20mm. Aplica el pegamento en la ranura y en la parte interior, pero limpia perfectamente los restos de Epoxi de la exterior y de la plataforma (si los hubiera). El tubo tiene que encajar perfectamente en el agujero del Efector y asentar en él. Cualquier resto de Epoxy lo impediría o quedaría torcido.
Dobla alrededor del tornillo M3 el trozo de alambre de cobre y suéldalo con un poco de estaño. Suelda en el otro extremo un conector de una vía.
Atornilla el tornillo M3, junto con el alambre y el conector, en el agujero previsto en la plataforma, justo en el centro del anillo del tubo.
Si tienes previsto utilizar el Cabezal de Taladrado ahora es el momento de construir el contrachapado de sacrificio que protege la plataforma de las brocas. Corta una pieza de 70x80 de contrachapado de 2.5mm de grosor y taladra la matriz de agujeros de 2.5mm con la plantilla.
La plataforma está lista.
Preparando el Efector
El Efector es la pieza de plástico que sujeta la plataforma. Lo hace mediante el tubo de alumino y tres tornillos que amordazan dicho tubo. Por la parte exterior tiene los agujeros para instalar las rótulas de las seis varillas delta que están unidas a él.
Ahora vamos a prepararlo.
Primero como siempre elimina los restos de plástico que hayan podido quedar del proceso de impresión en 3D.
IMPORTANTE: no uses la broca en los agujeros dónde iran atornilladas las rótulas de los brazos delta ya que es mejor que los tornillos hagan la rosca en el plástico para que no queden holguras.
Comprueba que el tubo de aluminio de la plataforma encaja perfectamente en el agujero central y repásalo con un cutter o una lima hasta que entre en él perfectamente y sin holgura. Mejor que quede algo prieto que holgado, y con la plataforma totalmente plana tocando la superficie del Efector. Tiene que girar algo en el agujero para que luego podamos alinear la plataforma con el robot.
Inserta con el soldador las tuercas M3 en los alojamientos correspondiente (ver siguiente foto). Estas tuercas son para los tornillos que amordazan el tubo y lo sujetan al Efector.
Coloca tres tornillos M3x14mm en los agujeros laterales (según foto).

Con esto terminamos de preparar el Efector. Tendrá un aspecto similar al de la siguiente foto:
Al finalizar las tareas de este capítulo tendremos todos los materiales y piezas 3D listos para ensamblar el bastidor.
Indice Home Siguiente capítulo