
TwinTeeth - Ensamblar el Cabezal Dispensador de Pasta
El cabezal dispensador de pasta consiste en un mecanismo movido por un pequeño motor de pasos que acciona una jeringa Luer-Lock rellena de pasta de soldadura. Permite la dosificación automática de pequeñas cantidades de pasta en los pads de PCBs SMD.
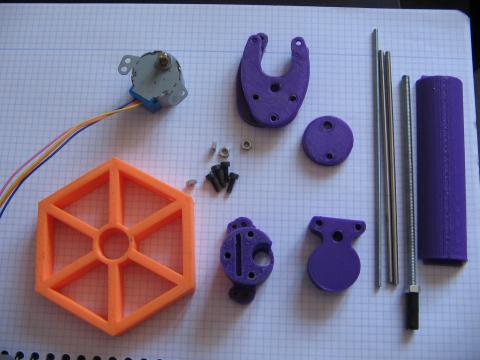
Para construir este cabezal necesitarás los siguientes materiales:
| Cantidad | Nombre |
|---|---|
| 1 | Hexágono del cabezal dispensador de pasta |
| 1 | Partes Impresas del Dispensador de Pasta |
| 2 | Varilla de acero-plata 3mm - 134mm |
| 1 | M5 x 140mm varilla roscada |
| 1 | M3 x 151mm varilla roscada |
| 1 | Motor 28BYJ-48-12V (modificado para convertirlo en bipolar) |
| 1 | Jeringa Luer-Lock 10CC |
| 1 | Aguja de dispensar Luer-Lock |
| 1 | 20mm de tubo de plástico flexible 5mm interior (acoplador del motor) |
| 1 | Driver de motor A4988 + Disipador (compartido con extrusor 3D) |
| 1 | Conector DB15 Hembra 2 filas con carcasa |
| 2 | Tornillo Allen M3 x 8mm |
| 2 | Tornillo Allen M3 x 10mm |
| 6 | Tuerca M3 |
| 2 | Tuerca M5 |
| 1 | Tuerca autoblocante M5 |
| 2 | Gotas de aceite |
Preparando las partes 3D
Revisa todas las piezas de plástico antes de montarlas y elimina con un cutter los restos de material de soporte, blobs, hilos, etc. que podrían quedar en el proceso de impresión 3D.
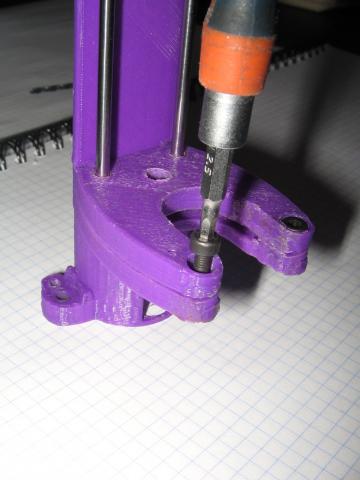
Mediante una broca de 3mm repasa los agujeros de las piezas donde se insertarán las guías lineales (varillas de acero 3x134mm).
Toma especial cuidado en repasar los agujeros de 3mm del Carro (ver imagen siguiente).

Introduce en él las guías lineales de 3mm y comprueba que se deslizan suavemente y sin demasiado juego.
Mediante una broca de 5mm repasa también los agujeros donde se instalará la varilla roscada M5x140mm (husillo). Esta varilla pasa por el agujero central de todas las piezas. Comprueba que la varilla se desliza bien a través de ellos y no roza con las paredes del agujero.
Usando el soldador, inserta una tuerca M3 en la parte posterior del Soporte del Motor y dos en la pieza inferior del Soporte de Jeringa.

Inserta también una tuerca M5 en el alojamiento previsto en el Carro. Esta es la tuerca que se deslizará por el husillo.Ten cuidado en instalarla correctamente. Utiliza un poco de plástico derretido para mantenerla en su posición.

Preparando el motor de pasos
El mecanismo dispensador utiliza un pequeño motor modelo 28BYJ-48-12V. Es un motor de pasos muy conocido del tipo unipolar que incluye una reductora 1/64.
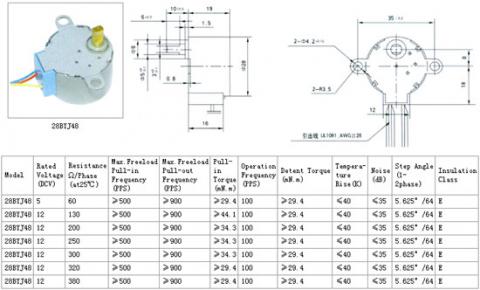
Para usarlo en TwinTeeth, primero tenemos que convertirlo en bipolar ya que los drivers A4988 y la tarjeta Ramps están diseñados para motores bipolares.
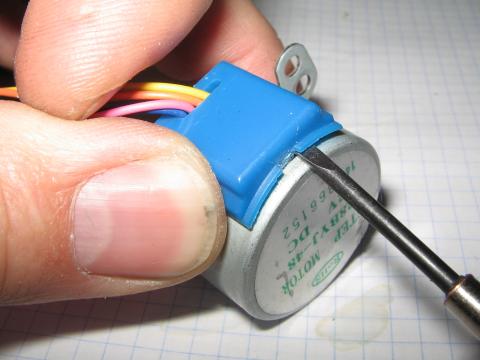
Modificar el 28BYJ-48 es muy fácil. Todo lo que necesitas es un cutter y un destornillador pequeño.
Primero utiliza el destornillador para quitar la tapadera de plástico azul. Esta tapadera cubre una pequeña PCB que contiene todas las conexiones del cableado.
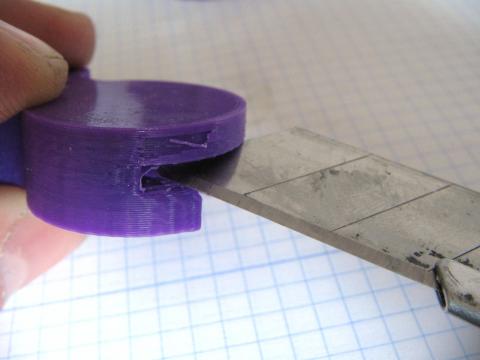
Utiliza la cuchilla para cortar la pista central de la PCB, donde está conectado el cable rojo. Corta también el cable rojo ya que no lo vamos a necesitar (ver imagen siguiente).
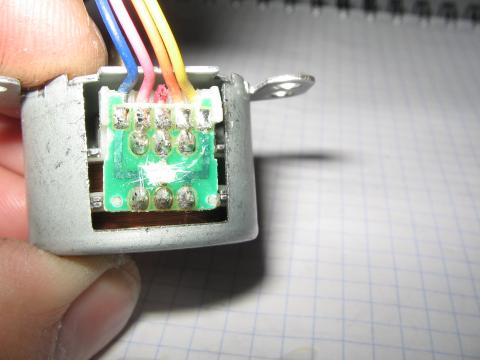
Coloca de nuevo la tapa. El motor ahora es bipolar y funciona con dos fases: (2A, 2B) que corresponden a los cables rosa y naranja y (1A, 1B) para el amarillo y el azul.
Ahora suelda los cables al conector DB15 hembra usando la siguiente configuración de pines:
| DB15 | Descripción |
|---|---|
| 5 | Bobinado 1-A - cable amarillo |
| 6 | Bobinado 2-B - cable naranja |
| 7 | Bobinado 1-B - cable azul |
| 8 | Bobinado 2-A - cable rosa |
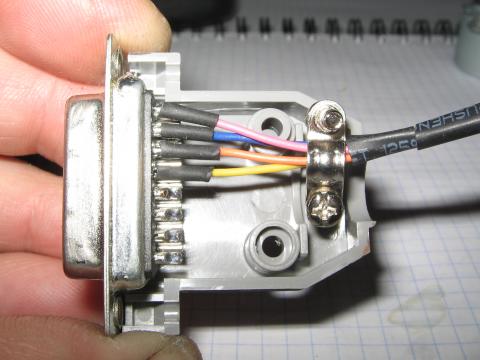
Coloca la carcasa en el conector y aprieta los tornillos.

Ensamblando el dispensador
Ahora vamos a montar el mecanismo dispensador.
Primero toma la varilla roscada M3 e insértala a través del agujero del Soporte del Motor hasta que alcance la tuerca M3 del otro lado.
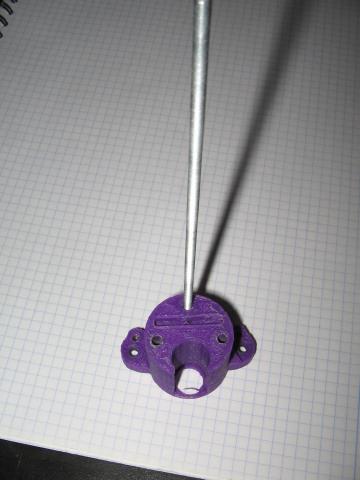
Luego rosca la varilla en la tuerca M3 hasta que quede a ras de ella.

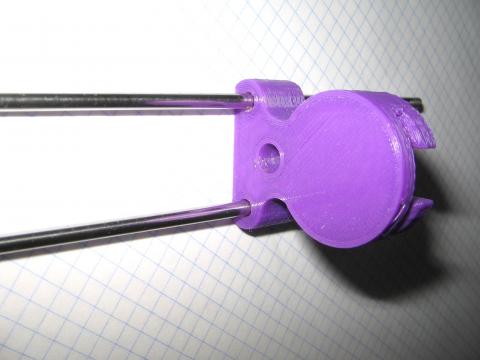
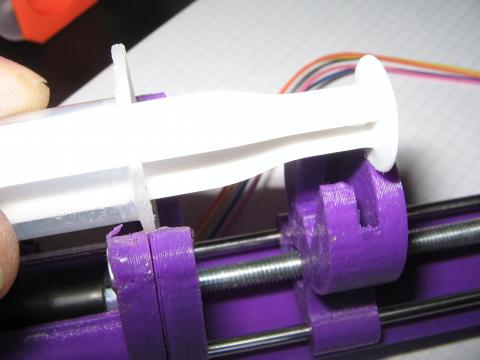
Inserta las varillas de acero de 3mm en los agujeros previstos para ellas en el Soporte del Motor (ver siguiente imagen)
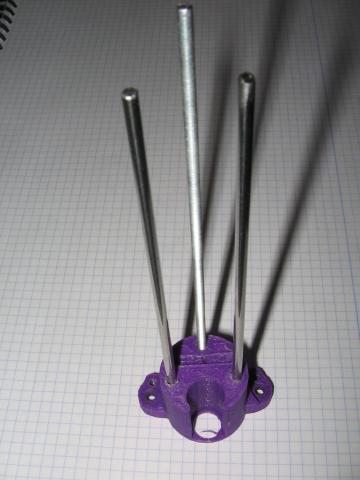
Desliza a través de ellas, y de la varilla M3, la pieza inferior del Soporte de la Jeringa. Tiene que quedar sobre el Soporte del Motor.
Desliza también por ellas la pieza superior del Soporte de la Jeringa hasta que descanse sobre la pieza inferior.
Instala entonces el pilar, insertando la varilla roscada M3 a través del agujero previsto en él.

Atornilla las dos piezas del Soporte de la Jeringa mediante dos tornillos M3x8mm.
Ahora inserta el Carro a través de las varillas de acero de 3mm.

Instala en la parte de arriba la Cubierta Superior y sujétala mediante una tuerca M3. Asegúrate de que las varillas de acero entran en sus agujeros, al igual que la pestaña del pilar y la varilla M3.


Pon una gota de aceite en cada varilla de acero y comprueba que el carro se desliza suavemente y sin atascos en toda su longitud.

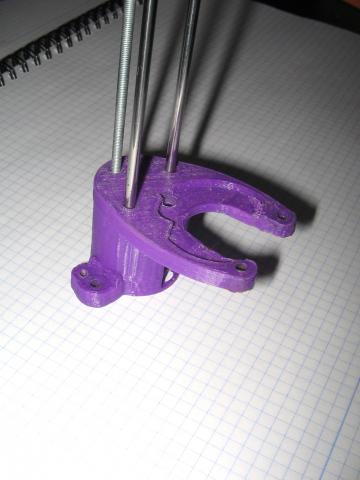
Rosca unos 10mm una tuerca en la varilla roscada M5. Corta a la medida (20mm) el tubo de plástico que hará las funciones de acoplador del motor y atorníllalo a continuación de la tuerca (ver siguiente imagen)

Inserta la varilla roscada a través del orificio del Soporte del Motor, luego a través de los orificios de las piezas del Soporte de la Jeringa. Atornilla entonces la varilla en la tuerca M5 del carro hasta que finalmente alcances con ella el agujero de la Cubierta Superior. Opcionalmente puedes atornillar allí una tuerca auto-blocante M5.
Pon una gota de aceite en la tuerca M5 del carro (es mejor usar grasa mineral o vaselina si tienes)
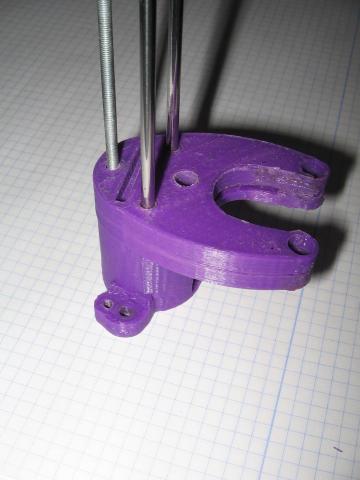
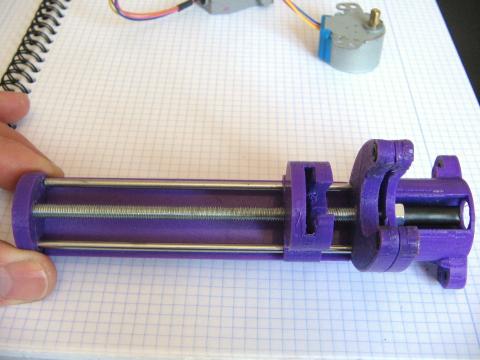
El mecanismo dispensador está casi terminado. Tendrá el aspecto de la siguiente imagen:
Instalando el motor
Ahora vamos a instalar el motor de pasos.
Inserta el eje del motor en el acoplador de plástico hasta que entre en él a presión.

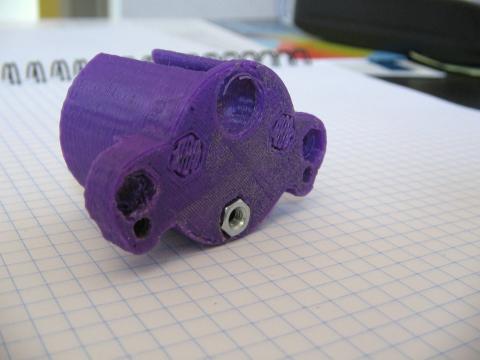
Entonces sujeta el motor al Soporte del Motor mediante dos tornillos M3x10mm con sus respectivas tuercas.
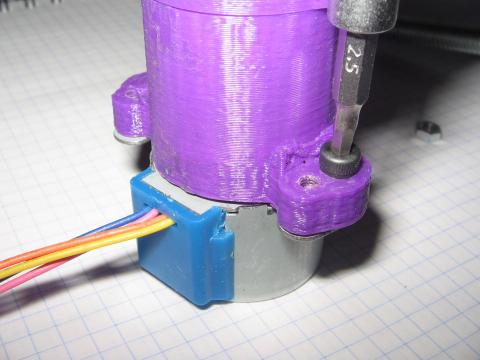

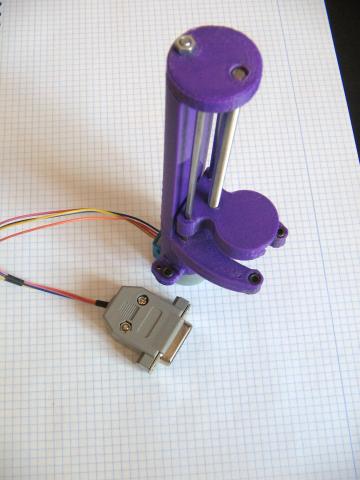
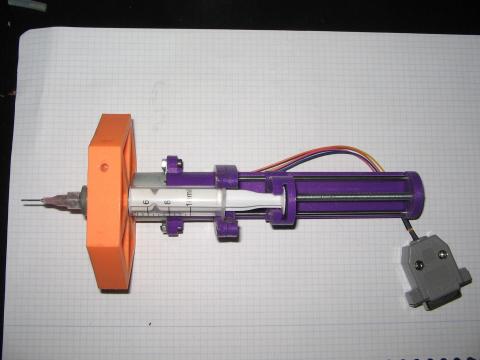
Ahora el dispensador está completo y tendrá el siguiente aspecto:
Instalando la jeringa
El dispensador utiliza una jeringa de 10cc del tipo Luer-Lock (incluida en el kit).
Para instalar la jeringa en el dispensador primero tienes que introducir el resalte del cuerpo de la jeringa entre las piezas del Soporte de la Jeringa. Entonces ajusta el émbolo de la jeringa a la distancia apropiada e insértalo en el alojamiento previsto en el Carro.

Luego gira el cuerpo de la jeringa 90 grados hacia la derecha hasta que quede bloqueada en el soporte. Para quitarla, simplemente gira hacia la izquierda el cuerpo de la jeringa y tira de ella suavemente para sacarla del dispensador.

Comprueba que el mecanismo de bloqueo de la jeringa funciona bien y ajusta las piezas de plástico con un soldador si es necesario hasta que funcione con suavidad.
Truco: El carro fue diseñado para alojar émbolos de jeringas de diferentes tamaños. Algunos modelos de jeringa encajarán mejor que otros en él y podría haber un pequeño hueco entre el émbolo y el cajeado del carro. Para evitar cualquier posible holgura recomendamos utilizar una pequeña cuña o algo similar. Insertala entre el extremo superior del émbolo en el cajeado del carro.
Rellenando la jeringa
La pasta de soldadura comercial suele venir en jeringas de diversos tamaños y tipos así que probablemente necesitarás transferir una cantidad determinada de pasta a la jeringa de 10cc que utiliza el dispensador. No puedes hacerlo por la parte del émbolo porque también introducirás aire en ella. Así que la única manera de hacerlo es por la punta de la jeringa, usando algún tipo de adaptador. Los puedes encontrar en el mercado. Son adaptadores Luer-Lock diseñados especialmente para esta tarea. Pero una forma alternativa y fácil de hacerlo es usando un trozo de tubo de silicona de 6mm. Conecta con él la punta de las dos jeringas (ver siguiente imagen).

Con este truco sólo tienes que presionar cuidadosamente el émbolo de la jeringa que contiene la pasta y transferir la cantidad que desees a la jeringa del dispensador.
Instalando el Dispensador
Antes de instalar al dispensador repasa la pieza hexagonal y elimina con un cutter los restos de material de apoyo, blobs, hilos, etc.
Usando una broca de 4mm broca repasa los agujeros laterales del hexágono (agujeros del retenedor).
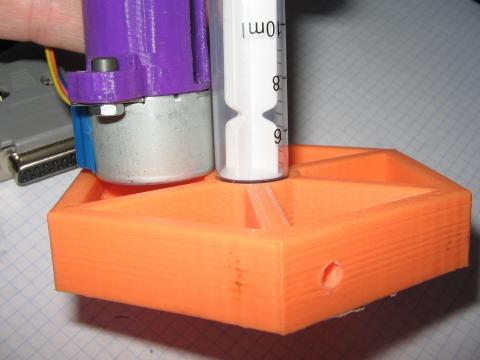
Llena la jeringa con pasta, instálala en el dispensador e insértala a través del orificio central del hexágono, hasta que el motor alcance la superficie superior del hexágono (ver siguientes fotos).

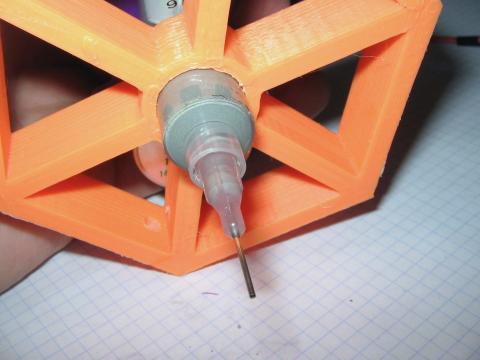
Luego instala la aguja.
Instalando el Driver A4988
Si no lo hiciste anteriormente ahora es el momento para instalar al driver del motor en la Ramps.
Comprueba que la impresora está desconectada, pega el pequeño radiador al IC del driver e inserta el driver en la posición E0 de la Ramps
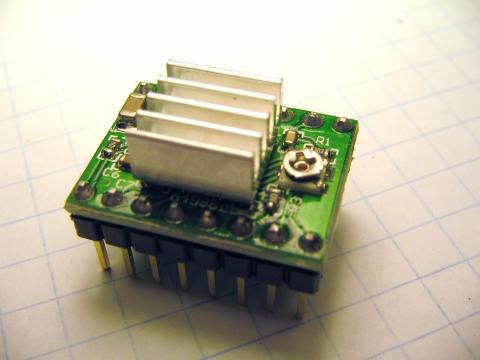
Este driver está compartido entre el motor del cabezal 3D y el motor del dispensador.
ADVERTENCIA: ten cuidado al instalar el driver porque si lo instalas incorrectamente se destruirá. También se destruye si conectas/desconectas los motores mientras la alimentación está conectada.
Si tomas como referencia los fusibles amarillos de la Ramps, a la izquierda de la placa, entonces la posición correcta del driver es con su pequeño potenciómetro hacia tu derecha.
Conecta los cables al nuevo driver. Comprueba que el conector está en la posición correcta como ya indicamos en el Capítulo 4 – Instalar la electrónica y el cableado.
El cabezal está listo para usarlo.
Comprueba que la impresora esté desconectada. Inserta el hexágono en TwinTeeth, fíjalo con los pernos de retención y conecta el cable del DB15.
Probando el Dispensador
Ahora vamos a probar el dispensador de pasta.
Primero instala en la plataforma una placa PCB virgen que utilizaremos para pruebas.
Luego conecta el ordenador al Arduino y ejecuta TwinTeethMC. Enciende la fuente de alimentación de TwinTeeth.
Ahora, selecciona el puerto COM para conectarte a TwinTeeth.
Una vez conectado, haz click en la pestaña "Paste Dispenser" y luego en el botón de Home.
Configurando la posición de inicio
Utilizando el control del eje Z, mueve con cuidado la plataforma hasta que la aguja toque ligeramente la superficie de la PCB.
Recuerda: coloca el puntero del ratón encima del botón de emergencia para poder pulsarlo rápidamente y parar así el robot en caso de que algo vaya mal. Si superas los límites podrías romper la aguja o la jeringa.
Una vez que la plataforma esté en posición, haz clic en el botón "Calibrate".

Pon el control Z min a cero porque usando el cabezal dispensador no necesitamos ir más allá de ese punto.
Haz click en el botón Set Program Zero, para establecer la ubicación actual como el (0,0,0)
Vuelve a hacer click en el botón "Calibrate" para ocultar los controles de calibración.
Luego pulsa en Home de nuevo.
Ahora, pulsa en el botón "Goto zero" para ir a la posición de inicio. La plataforma se moverá hacía arriba y se parará justo cuando la aguja toque la PCB.
Dispensando pasta
Ahora vamos a aprender a dispensar manualmente algo de pasta, sólo para ver que funciona bien el dispensador y cómo se maneja.
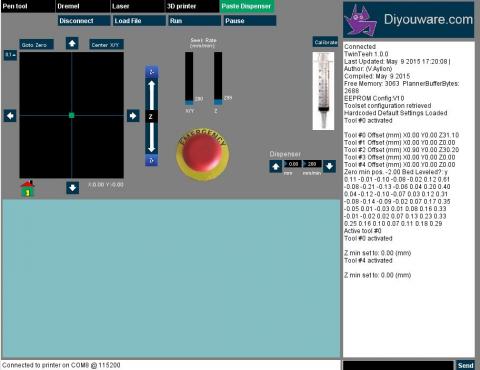
Cuando seleccionaste la pestaña del dispensador de pasta en el menú de TwinTeethMC, apareció en la pantalla un nuevo conjunto de controles. Son los controles del dispensador de pasta, similares a estos:

A la derecha verás un botón con la flecha apuntando hacia abajo. Si haces clic en él se moverá el actuador del dispensador los mm mostrados en el campo mm. Se moverá a la velocidad que muestra el campo mm/min. Ambos campos son controles deslizantes, así que puedes ir sobre ellos con el ratón y hacer clic y arrastrar a derecha o izquierda para cambiar su valor.
La flecha de la izquierda que señala hacia arriba es la del retroceso. Si pulsas en ella el actuador se moverá de forma similar a como lo hacia con la otra flecha, pero en sentido contrario. Es útil para detener el suministro de pasta. Los dispensadores de pasta suelen tener mucha histéresis y esto significa que la pasta continúa fluyendo después de detener el movimiento de la jeringa. Así que la forma habitual para detener la dosificación es mover el dispensador algunos milímetros en sentido contrario hasta que deje de fluir.
Los botones de avance y retroceso también son útiles para mover el actuador a la posición donde es posible instalar la jeringa precargada. Recuerda que debes cargar la jeringa con pasta desde la punta y entonces el émbolo se deslizará fuera del cuerpo algunos centímetros (dependiendo de la cantidad de pasta transferida) Cuando intentes introducir esta jeringa precargada en el dispensador verás que deberás mover el carro hasta la posición adecuada y colocar entonces el émbolo de la jeringa . Esto es así porque no puedes mover hacia afuera el émbolo de una jeringa precargada (si lo haces introducirás aire en la jeringa y esto no es muy deseable)
Ahora vamos a ver cómo controlar la velocidad del flujo. Moviendo el deslizador verás que la velocidad tiene un margen muy estrecho. Esto es debido a que el motor incorpora una reducción de 1/64. Esto significa que puede funcionar muy lentamente. Tan lentamente que a veces no puedes ver que se está moviendo. En el otro extremo, si aumentas la velocidad demasiado el motor perderá pasos y patinará, así que mantén la velocidad a un valor razonable.
Ahora vamos a comprobar si funciona el dispensador.
Pulsa en el botón de Home.
Selecciona 1mm en el deslizador de longitud y 196 mm/min en el deslizador de velocidad. Haz clic en la flecha hacia abajo para dispensar dicha cantidad de pasta. Luego haz clic en el botón contrario para moverlo hacia arriba.
Si el motor no se mueve entonces algo anda mal. Comprueba primero si ajustaste correctamente el controlador A4988. Comprueba que el potenciómetro está en la posición correcta, tal y como mostramos en el Capítulo 6 – Calibrar el robot. Ajústalo si ves que es necesario.
Si continúa sin moverse. Revisa el cableado y las conexiones del DB15. Si no encuentras el fallo desmonta el motor del dispensador y pruébalo de forma independiente hasta descubrir lo que sucede.
El dispensador ya está listo. Antes de usarlo en una PCB real, tómate algún tiempo para familiarizarte con él.
Vamos a aprender más cosas sobre cómo usarlo en el capítulo "Cómo usar el robot".
Capítulo anterior Indice Home Siguiente capítulo